de l´Information et
de la Communication pour
l´Éducation et la Formation
version à télécharger (pdf)
Volume 28, 2021
Article de recherche
Numéro Spécial
Technologies pour l’apprentissage de l’Informatique de la maternelle à l’université
|
Contact : infos@sticef.org |
Initier des élèves de maternelle à la robotique/informatique : quand les supports médiateurs impactent la grammaire de l’agir enseignant
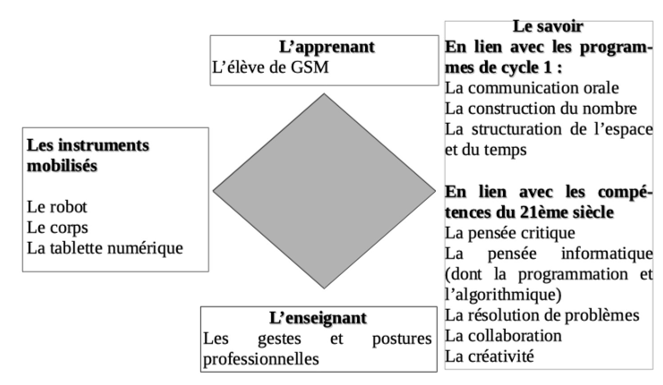
1. IntroductionLe projet de recherche Blue Bot s'est déroulé entre 2016 et 2019 et s’est attaché à étudier plusieurs aspects en lien avec les apprentissages du codage informatique auprès d’enfants de maternelle. Il a impliqué trente-cinq enseignants, deux cent trente élèves de 5 ans répartis dans vingt-huit écoles du Nord de la France. La question centrale du projet consistait initialement à étudier l’influence de la robotique et du numérique sur l’apprentissage d’élèves de grande section de maternelle (GSM). Ce questionnement s’inscrivait pour nous, dans la continuité des travaux de recherche en lien avec la robotique pédagogique initiée par Papert dès les années 70 (Papert, 1981) et qui a suscité de l’engouement mais également des interrogations (Cohen et Mialaret, 1987) sur leurs apports en termes de développements cognitifs chez l’enfant. En parallèle, il s’agissait d’étudier si la tablette numérique, dont les premières introductions en maternelle remontent au début des années 2010 (Mélot et al., 2018), constituait une modalité facilitant la médiation cognitive dans l’acquisition de la programmation séquentielle chez de jeunes élèves. Après échanges avec les enseignants et les inspecteurs académiques impliqués dans ce projet, il a été décidé d’étudier également les apports du corps qui constitue pour les enseignants de maternelle la modalité de référence pour prodiguer leurs enseignements en classe. C’est ainsi qu’a été mise en place une étude comparative basée sur des séances pédagogiques dans lesquelles le jeu est utilisé comme technique d’apprentissage (Alvarez, 2018). Déclinées selon trois modalités (Corps, Robot-jouet et Tablette), ces séances ludopédagogiques présentaient le même scénario d’apprentissage visant à initier à la pensée informatique des enfants de 5 ans inscrits en GSM. Du point de vue de la recherche, nous avons étudié l’influence des trois modalités en jeu sur l’apprentissage des élèves à partir de l’identification de leurs stratégies, performances et conceptions (Alvarez et al., 2021), (Bellegarde et al., 2019). Cependant, une autre dimension, à laquelle nous ne pouvions nous soustraire, est apparue nécessaire à interroger : la grammaire de l’agir enseignant (Bucheton et Soulé, 2009) dans le cadre d’une initiation à la programmation. Concrètement, quels gestes et postures professionnels les enseignants ont-ils développés dans le cadre d’une initiation à la programmation ? En parallèle, dans quelles mesures les modalités utilisées ont-elles influé leurs pratiques d’enseignement ? Ce présent article explore ainsi l’influence des différentes modalités sur l’agir enseignant interrogé à partir de l’identification, chez les praticiens ayant participé à l’expérimentation Blue Bot, de leurs gestes, postures et conceptions professionnels. Après avoir mené une réflexion théorique sur l’enseignement de l’informatique en maternelle, nous présenterons tout d’abord la méthodologie déployée pour procéder à l’analyse de l’activité enseignante dans le cadre du projet Blue Bot, puis nos analyses, qui nous conduiront à identifier des gestes et postures professionnels particuliers en fonction des trois modalités en jeu. 2. Enseigner la programmation à des élèves de cycle 1Cette première partie rend compte des investigations théoriques menées en vue d’approcher la question de l’enseignement de la programmation à des élèves de GSM. Nous examinerons les trois considérations scientifiques suivantes : - Programmer en GSM questionne la place et le statut à donner aux sciences informatiques à l’école : s’agit-il d’un objet d’enseignement à part entière ou seulement d’un outil d’enseignement ? - L’usage de la robotique pédagogique permet-elle aux jeunes élèves de commencer à appréhender des concepts de programmation ? - Initier de jeunes élèves à la robotique pédagogique interroge le rôle de l’agent médiateur humain, ses gestes et postures professionnelles. 2.1. Les sciences de l’informatique à l’école maternelle : un objet d’enseignement au service d’autres apprentissagesÀ l’école maternelle, il n’existe pas de compétences à proprement parler qui visent la programmation et le codage informatique. En effet, la seule référence du programme de l’école maternelle en France, en lien avec la programmation et le codage informatique, concerne l’identification du principe d’un algorithme et la poursuite de son application (BO spécial n°2 du 26 mars 2015). Mais, il s’agit ici de compléter une suite à partir de critères préalablement identifiés. Cette simple référence à l’algorithme peut néanmoins justifier l’initiation à la robotique/informatique en classe de GSM. Dans cette perspective, initier des élèves à la programmation apparaît cohérent avec la réintroduction, en 2016, de la science informatique dans les programmes de L’Éducation Nationale à l’école élémentaire et au collège et avec le nouveau socle commun de compétences. Et pourtant, si l’on considère l’école maternelle comme la base sur laquelle va se construire l’ensemble des apprentissages de la vie de l’élève, on sent bien la nécessité d’amorcer, dès le cycle 1, certains savoirs, qui se concrétiseront par un apprentissage « systématisé » quelques années plus tard, notamment en cycles 3 et 4. En effet, la continuité des apprentissages et la fluidité des parcours sont deux aspects importants dans la scolarité des élèves, de l’école primaire au supérieur. Les besoins de compétences numériques des élèves ont d’ailleurs été réaffirmés avec l’introduction de nouveaux enseignements au lycée à la rentrée 2019 et par la mise en place d’un cadre de référence des compétences numériques (CRCN). Ce référentiel, outil de positionnement et de certification, est paru au Journal officiel le 30 août 2019 (décret n° 2019-919). Il donne lieu à une certification des compétences numériques (https://pix.fr/) dont la programmation informatique en fin de cycle 4 et au cycle terminal du lycée. Ainsi, une initiation précoce aux concepts de robotique et de programmation s’inscrit, selon nous, dans une démarche cohérente au regard des compétences numériques à acquérir dans les cycles supérieurs. Un débat persiste cependant autour de l’apprentissage de l’informatique à l’école : s’agit-il d’un outil d’enseignement au service d’autres disciplines ou d’un objet d’enseignement à part entière ? S’agit-il d’apprendre à programmer ou de programmer pour apprendre (Baron et Drot-Delange, 2016), (Béziat, 2012) ? Nous adopterons, dans cet article, un positionnement intermédiaire qui envisage la programmation comme un objet d’enseignement, qui favoriserait également l’acquisition de certains apprentissages premiers, langagiers et culturels, qui dépassent les notions algorithmiques1 : la communication orale, la construction du nombre, la structuration de l’espace et du temps, la résolution de problèmes, la collaboration ou encore l’abstraction (Greff, 2004). 2.2. La robotique pédagogique : vers une initiation précoce à la pensée informatiqueLa robotique pédagogique, initiée par Papert (1981) au début des années 70 avec la tortue de plancher Turtle, associée au langage de programmation Logo, s’inscrit dans le modèle constructiviste des apprentissages (Komis et Misirli, 2011). En tant qu’« objets pour penser avec » (Papert, 1981, p. 23), les robots permettent une manipulation et une expérimentation à partir de situations réelles, dans un contexte de résolutions de problème et de développement de la pensée algorithmique : « l’élève est l’artisan de sa propre formation en se posant lui-même ses problèmes. [...] Un système comme LOGO est un des moyens de donner à l’élève un comportement actif dans un processus d’acquisition de concepts ou de prise de conscience d’un mécanisme » (Vivet, cité par Denis, 2000, p. 196). Considérés comme « les bâtisseurs [de leurs savoirs,] de leurs propres structures intellectuelles » (Papert, 1981, p. 17), les enfants sont également « épistémologues » (Papert, 1981, p. 31) dans le sens où ils seraient amenés à entrer dans une étude critique de leur propre réflexion. La robotique pédagogique contribuerait ainsi à débarrasser la notion d’erreur du sentiment de sanction intellectuelle : la recherche du bug du programme, son analyse, sa compréhension et sa correction font partie intégrante de l’activité de programmation et constituent une étape du processus d’apprentissage. Initier de jeunes élèves à la programmation via la robotique pédagogique constitue alors une mise en pratique intéressante de la pensée informatique (computational thinking) (Wing, 2008) ; la démarche intellectuelle pouvant faire l’objet d’une application concrète, d’une confrontation au réel. A l’instar de Wing, nous pensons que « la pensée informatique est un ensemble d’attitudes et d’acquis universellement applicables [la logique, l’algorithmique, la décomposition, la recherche de similitudes entre les sous-problèmes, l’abstraction et l’évaluation] que tous, et pas seulement les informaticiens, devraient apprendre et maîtriser » (Wing, 2008, p. 1). Dans cette perspective, Romero (Romero, 2018) invite à dépasser l’enseignement du codage (au sens de coder avec un langage informatique) pour s’inscrire dans une démarche plus large qui engage les apprenants dans un processus critique et créatif de la résolution de problème. Cette programmation créative fait ainsi appel aux concepts et processus informatiques, à la pensée informatique : « Il ne s’agit pas de coder pour coder, ou d’écrire des lignes de code les unes après les autres, mais de développer une approche de résolution de problèmes complexes qui engage dans une analyse réflexive et empathique de la situation, de sa représentation et de l’opérationnalisation d’une solution qui profite des stratégies métacognitives liées à la pensée informatique » (Romero, 2018, p. 72). Le robot programmable Blue Bot que nous avons choisi dans le cadre des expérimentations que nous présentons ici, autorise une appréhension précoce des concepts de robotique et de programmation et plus largement, une entrée dans la pensée informatique. En effet, véritable outil de médiation, le jouet programmable, de par ses aspects ludiques et tangibles, favorise la motivation des élèves et leur implication dans des activités porteuses de significations (Komis et Misirli, 2013) tout en leur permettant de s’y identifier par « effet miroir ». Linard (Linard, 1996) nous met cependant en garde contre le mythe de l’autogenèse cognitive qui consisterait à négliger le rôle de la médiation humaine vis-à-vis des médiations techniques. Or, le soutien humain sera toujours nécessaire pour relayer l’information médiatisée et ainsi aider les élèves à faire, à penser, à comprendre, à réfléchir sur leurs actions et finalement, les aider à apprendre (Leroux, 2002), (Vivet, 2000). 2.3. La médiation humaine au service de la robotique pédagogique : la grammaire de l’agir enseignant en questionsS’approprier un savoir suppose toujours un processus d’objectivation qui n’est possible que par l’action d’un système médiateur qui va jouer le rôle d’intermédiaire entre le sujet et le savoir. Composé d’aspects très hétérogènes, ce système médiateur comprend des personnes ayant des statuts différents (médiateur ou apprenant) et des artefacts culturels (Weil-Barais et Resta-Schweitzer, 2008). La fonction de médiation de l’enseignant renvoie à celle d’étayage, à la manière dont un adulte, plus expert, organise le monde pour l’enfant dans l’optique d’assurer la réussite de ses apprentissages (Bruner, 1983). La recherche que nous présentons ici implique l’utilisation d’artefacts de type robotique, tablette numérique et corporel qui suppose une activité de didactisation exercée par l’enseignant à travers ces artefacts. Dans cette perspective, nous envisageons la médiation comme un processus résultant soit de l’action directe d’une personne, soit de son action indirecte exercée par le biais des instruments. À l’instar de Rézeau (Rézeau, 2002), nous proposons de penser le système médiateur dans le projet de recherche Blue Bot (figure 1) sous la forme d’un carré pédagogique qui met en évidence le rôle d’agents-médiateurs joué à la fois par l’instrument et l’enseignant.
Figure 1 • Le système médiateur dans le projet Blue Bot La réflexion que nous souhaitons mener dans cet article focalise son attention sur trois pôles du carré, l’instrument, l’enseignant et le savoir. Il s’agit ainsi de comprendre l’influence de la tablette numérique et de la robotique sur l’agir enseignant, agir questionné dans le cadre d’une initiation à la programmation. Le modèle théorique du multi-agenda a constitué un cadre d’analyse de ces situations didactiques, appréhendées dans leur dimension située et à travers l’identification des différentes configurations de gestes professionnels enseignants et de leurs effets sur les dynamiques cognitives et relationnelles dans la classe. Dans une perspective heuristique, il s’agit alors « de dérouler la pelote de ce qui se joue dans la classe pour pouvoir mieux rendre compte de la complexité et l’épaisseur de l’agir du maître » (Bucheton et Soulé, 2009, p. 32). Le modèle du multi-agenda dessine la matrice de l’activité de l’enseignant à travers la conjugaison de cinq préoccupations majeures : - piloter et organiser le déroulé de la leçon (« le pilotage »), - conserver un espace de travail et de collaboration langagière et cognitive (« l’atmosphère »), - tisser le sens de ce qui se déroule (« le tissage »), - étayer le travail en cours de réalisation (« l’étayage »), - avec pour objectif un apprentissage (« les objets de savoir et les techniques »). Présentes de la maternelle à l’université, ces cinq macro-préoccupations constituent les invariants de l’activité enseignante, l’essence des gestes professionnels. Bucheton et Soulé appréhendent la grammaire de l’agir enseignant comme « l’organisation modulaire, systémique et dynamique des gestes professionnels (le jeu des postures d’étayage des maîtres) » (Bucheton et Soulé, 2009, p. 45). A leur instar, nous appréhendons l’agir enseignant sous le prisme d’un ajustement permanent des gestes et postures en fonction des situations. Cet ajustement est un principe fondateur du geste professionnel. L’approche comparative développée dans ce travail de recherche nous conduit à observer, analyser et comprendre les changements de gestes et postures en fonction des instruments en jeu (robot, corps, tablette). 3. Présentation de l’enquête de terrainAu démarrage de cette recherche, nous avons fait l’hypothèse que la robotique, par sa dimension tangible et extracorporelle et les possibilités de décentration et de manipulation de l’objet-robot qu’elle procure à l’élève (Béziat, 2012), (Komis et Misirli, 2011), conduirait particulièrement à une mise en retrait2 de l’enseignant au profit d’apprentissages autodirigés chez les élèves. Nous étudierons l’agir enseignant sous le prisme des gestes, postures et conceptions professionnels construits à travers la conduite de séances d’initiation à la programmation. Les informations exposées ci-dessous entendent procurer au lecteur les éléments de repérage sur la manière dont a été mise en œuvre l'enquête de terrain. 3.1. Dispositif expérimental mis en œuvreLes expérimentations Blue Bot ont été menées durant l’année 2017 et ont concerné trente-cinq classes de GSM et vingt-huit écoles du Nord et du Pas-de-Calais. En amont des expérimentations, une série de séminaires associant enseignants, inspecteurs académique de l’académie de Lille, représentant de la Délégation Académique du Numérique pour l’École (DANE), représentants de l’Institut National du Professorat et de l’Éducation (INSPE) et enseignants-chercheurs a été organisée durant le dernier semestre 2016. C’est lors de ces échanges qu’il est apparu que la majorité des enseignants n’avaient jamais fait l’usage de robots en classe. Pour répondre à cette situation, une séance d’initiation a été organisée pour permettre à l’ensemble des enseignants de se familiariser avec le robot Blue bot, la barre de programmation associée d’une part, et l’application Blue Bot app fonctionnant sur tablette numérique, d’autre part. Élaboré selon une progression en trois temps, les scénarios expérimentés en classe ont été pensés de manière à être transposables aux trois supports (robot, tablette, corps). Le tableau ci-dessous est une synthèse des différents temps de l’expérimentation3. Tableau 1 • Vue générale du scénario pédagogique
Dans le cadre de l’expérimentation Blue Bot, la même séance ludopédagogique convoquant la thématique du robot dans un objectif d’initiation à la robotique/informatique, et au codage en particulier, a été mise en œuvre au sein des classes selon les trois modalités suivantes : - Utilisation du corps : un enfant incarne le robot et doit se déplacer sur un damier reproduit au sol. Un autre enfant lui dicte les instructions à effectuer (Figure 2 - gauche). - Utilisation du robot : les enfants programment le robot jouet Blue Bot qui se déplace sur un damier imprimé sur un tapis en plastique posé sur une table (Figure 2 – milieu)4. - Utilisation d’une tablette numérique : le jeu est reproduit à l’identique dans un environnement entièrement virtuel qui se joue sur tablette (Figure 2 – droite).
Figure 2 • Modalités Corps, Robot, Tablette Les situations-problème proposées aux élèves sont construites autour de l’histoire de Vibot – le robot (Romero, 2016), personnage que l’enfant doit programmer pour le conduire en différents lieux. Les activités de programmation se réalisent sur un damier de 24 cases (6 x 4) avec une barre et des cartes de programmation. L’élève conserve alors la trace du programme et un travail sur l’erreur est possible. Les élèves réalisent les activités par groupe de quatre, maximum, sur un temps d’environ trente minutes. Afin de mesurer l’influence des instruments (robot, tablette, corps) sur l’agir enseignant, l’expérimentation a été réalisée de façon à ce que les enseignants mettent en œuvre le scénario pédagogique en expérimentant les supports dans des ordres différents5. 3.2. Modalités d’élaboration du corpus : l’analyse de l’activité enseignante au cœur de l’investigationCette étude s’inscrit dans une approche compréhensive de la grammaire de l’agir enseignant dans le cadre de séances d’initiation à la programmation. L’analyse de l’activité enseignante a constitué le cœur de la démarche d’investigation mise en œuvre. Trois modalités d’élaboration du corpus ont été retenues. D’abord, des captations vidéo des situations éducatives ont été réalisées de manière à déconstruire-reconstruire la dynamique de la situation d’enseignement et à identifier les invariants significatifs de l’agir enseignant. Sept enseignants ont été filmés à trois temps particuliers du scénario pédagogique (séance 1 - étape 2, séance 4, séance 7 (cf. tableau 1) et, ceci pour chaque modalité mise en œuvre, soit un total de 63 séances filmées. Ensuite, des documents de suivi ont été mis à la disposition des enseignants dans l’optique de saisir leur regard porté sur leur activité et celle des élèves. Dix-sept évaluations intermédiaires et quatorze carnets de bords ont pu faire l’objet d’une exploitation6. Enfin, dans cette même visée, des entretiens semi-directifs ont été réalisés avec les sept enseignants filmés après l’expérimentation de chacun des supports dans leur classe (soit un total de 21 entretiens). Notre échantillon d’enquête a été constitué de manière aléatoire sur la base du volontariat des enseignants. Aucun critère de sélection, lié à la culture numérique des enseignants, par exemple, n’a pu être retenu. Par ailleurs, nous ne possédons pas de données descriptives liées à la totalité de notre échantillon. Seuls les sept enseignants, dont nous avons filmés les séances d’initiation à la programmation et avec lesquels nous avons réalisé des entretiens, ont fait l’objet de questionnements liés à leur profil. Ainsi, cet échantillon de sept enseignants est composé de six femmes et un homme. Tous enseignent à l’école maternelle depuis au moins 10 années et trois enseignants depuis plus de vingt ans. Trois sont directeurs d’école, un possède le Certificat d’Aptitudes aux fonctions d’Instituteur ou de Professeur des École Maître Formateur (CAFIPEMF) et deux sont inscrits en master à l’INSPE dans l’optique d’obtenir cette certification. Deux d’entre eux déclarent avoir pratiqué ou pratiquer la programmation : le premier a programmé dans les années 80 dans le cadre de ses études (DEUG Maths, Informatique et Sciences Sociales - MIS) et le second, autodidacte et « féru d’informatique », programme en lien avec la gestion de sites internet. Leurs pratiques de classe montrent un usage quotidien du numérique : six utilisent les outils numériques tous les jours et un, une fois par semaine. Ils possèdent au moins un ordinateur dans leur classe ; les jeux éducatifs et le traitement de texte constituent les deux activités mentionnées. Cinq possèdent par ailleurs un Tableau Blanc Interactif (TBI). Aucun ne déclare de difficultés particulières en lien avec l’usage des outils numériques. Au moment de l’expérimentation Blue Bot, ils n’ont jamais enseigné la programmation et fait usage de la robotique en classe. 4. Enseigner la programmation à des élèves de GSM : des gestes, postures et conception professionnels en « (trans)formation »L’analyse de l’activité enseignante met en évidence la grammaire de l’agir des professionnels confrontés à l’enseignement de la programmation en classe de GSM, à travers des gestes, postures et conceptions professionnels qui se (trans)forment au fil de l’expérimentation. Elle souligne également l’influence des instruments sur ces configurations enseignantes. 4.1. Des gestes professionnels de soutien aux activités de programmation des élèvesÀ l’instar de Bucheton (Bucheton, 2014), nous envisageons le geste professionnel comme un ensemble d'actions, de mouvements et d'opérations mentales, articulés et coordonnés, visant la réalisation d'une tâche d’enseignement. Celui-ci requiert la mobilisation de compétences professionnelles. Six gestes professionnels majeurs ont été observés chez les enseignants dans le cadre de notre expérimentation. Ceux-ci sont orientés vers le soutien des activités de programmation des élèves. 4.1.1. Le rappelLe rappel est le premier geste professionnel observé chez les enseignants à travers la verbalisation des consignes, règles et principes propres à l’activité de programmation (par exemple, l’usage de la touche « X » pour effacer le programme ou encore la rotation sur place exercée par le robot). Ce geste professionnel apparaît également dans l’agir enseignant au travers du rappel de ce qui a été fait lors des séances précédentes. À travers le rappel, il s’agit pour l’enseignant de « dire » au sens de rendre explicite pour les élèves ce qu’ils doivent faire et comment. Il s’agit également de rendre disponible, pour les élèves, les connaissances antérieures qui devront être mobilisées dans l’activité. On se situe, ici, dans une action de « tissage » (Bucheton et Soulé, 2009) ; en début de séance, l’enseignant met en relation la tâche en cours avec celles qui précèdent. « J'ai eu des actions de rappel, je commence toujours par un rappel de ce qui a été fait les fois précédentes. [...] J'étais vraiment là pour donner des consignes. » (Entretien enseignante M, Robot_17) 4.1.2. La reformulationLe geste de reformulation observé chez les enseignants prend trois formes : - celle d’une reformulation des consignes, des règles et principes de la programmation, - celle d’un modèle verbal suscité par l’enseignant, - celle de la reprise des propos d’un élève pour les mettre en relief et ceci, notamment pour faire avancer le raisonnement de l’ensemble du groupe. Dans le second cas, il peut s’agir d’insister sur les connecteurs de temps pour travailler la chronologie des actions en utilisant un vocabulaire précis. Ce qui est alors visé par l’enseignant à travers ce second geste professionnel, c’est de mettre l’accent sur des éléments de la tâche jugés importants pour comprendre, réfléchir, réussir et surtout apprendre. L’enseignant se situe ici dans une action de « pilotage ». « Reformulation du parcours en insistant sur les connecteurs de temps : d’abord, après, enfin. » (Évaluation intermédiaire enseignant H, Robot_3) 4.1.3. Le questionnementLe questionnement est un geste professionnel tout particulièrement convoqué par les enseignants. Quatre visées principales de ce geste ont été observées : - solliciter chez les élèves la verbalisation de leurs stratégies, les amener à communiquer avec leurs camarades sur leurs manières de faire et de penser, notamment pour des élèves qui auraient tendance à réaliser l’activité sans parler, - les inciter à convoquer des savoirs scolaires, par exemple, utiliser les notions de « droite » et de « gauche » pour donner les instructions quand il est plus facile d’indiquer la direction avec la main, - les inviter à utiliser un procédé particulier, notamment en leur demandant le chemin qu’ils ont choisi pour les encourager à le montrer avec le doigt avant de coder le programme. Par ce geste professionnel du questionnement, l’enseignant va chercher à ce que les élèves rendent explicite ce qu’ils font, leur raisonnement mais également à ce qu’ils utilisent des savoirs et savoir-faire scolaires et enfin à ce qu’ils réfléchissent à ce qu’ils font pour accompagner la réussite de l’activité. L’enseignant met ici en œuvre une action d’ « étayage » orientée vers « les objets de savoir ». « Le maître doit encourager les élèves à parler, les questionner pour les amener à expliquer ce qu’ils font et comment ils font. Il faut aussi veiller à interroger les élèves qui font sans parler. » (Carnet de bord enseignant H-B, Tablette_1). « Je leur demande de changer le message de celui qui guide sans changer les picto[grammes] pour les amener à utiliser le nombre. » (Évaluation Intermédiaire enseignant C, Corps_2). 4.1.4. L’aide dans l’activitéBienveillants et soucieux de la réussite de leurs élèves, les enseignants ont également développé un certain nombre de gestes afin de les aider dans la réalisation de l’activité : - la simplification de la tâche (retrait d’une contrainte, d’un déplacement etc. ou ajout d’un outil supplémentaire) dans l’optique de permettre sa réussite, - la prise en charge d’une partie de la tâche (« le faire avec » ; « je commence et tu finis »), - ou sa totalité (« le faire à la place de ») à travers le geste du « contre-étayage », l’enseignant pour avancer plus vite, si la nécessité s’impose, pouvant aller jusqu’à faire à la place de l’élève ou donner la réponse. Tous ces gestes permettent à l’enseignant de guider les élèves dans la réussite de l’activité, ne pas les mettre en situation d’échec et redonner à l’erreur un statut positif, dans une « atmosphère » propice aux apprentissages. « Les cartes ’’tourne à gauche’’ ont été enrichies d’une gommette colorée afin de rappeler le chouchou porté par les élèves au poignet gauche [lors des activités préliminaires de repère dans l’espace mettant en scène le corps de l’élève proposées aux élèves en amont du travail de programmation] et faciliter ainsi le transfert. » (Carnet de Bord enseignant B., corps_1). « Aidée par l'enseignant pour la verbalisation de chaque déplacement » (Évaluation Intermédiaire enseignant SO, tablette_1). 4.1.5. Le maintien dans l’activitéUn autre geste particulièrement observé chez les enseignants est celui du maintien dans l’activité des élèves. Ces praticiens encourageaient les élèves, valorisaient leurs réussites, régulaient le travail collectif à travers la distribution des tâches (par exemple en veillant à ce que chacun joue son rôle dans l’activité) ou proposaient une différenciation pédagogique en fonction du niveau des élèves (simplification ou complexification de la tâche). Derrière tous ces gestes de maintien dans l’activité, l’objectif est celui de conserver et renouveler la motivation des apprenants, de maintenir « une atmosphère » propice à un espace de travail et de collaboration langagière et cognitive (Bucheton et Soulé, 2009). « C’est aussi le rôle de l’enseignant de dire ‘’c’est bien, tu as bien travaillé aujourd’hui. C’est un peu difficile, on reprendra demain’’. [...] A chaque fois c’était une évaluation positive. Je disais ‘’tu t’es trompé mais vas-y corrige toi, tu vas y arriver’’. Donc, j’ai essayé d’être bienveillante. [...] Le fait de les encourager, c’est vraiment important. » (Entretien enseignant W, robot_1) 4.1.6. La mise en retraitLe dernier geste professionnel observé est celui de la mise en retrait volontaire de l’enseignant. Ce dernier se met alors en position d’observateur et invite les élèves à collaborer, à co-construire la solution au problème de programmation posé, ce travail entre pairs autorisant une analyse et une correction du programme par les élèves eux-mêmes. Ce geste, expert, de « pilotage » permet à l’enseignant d’observer ses élèves et d’entrer dans un rôle de modérateur. « J'essaie toujours de me mettre en retrait mais j'essaie que ce soit vraiment les interactions des enfants qui leurs permettent de trouver eux-mêmes les solutions aux problèmes qui leur sont proposés. Donc, moi, je suis là plus pour réorienter leurs réflexions mais j'essaie de pas trop les guider. » (Entretien enseignant MLP, tablette_2). 4.2. Des postures professionnelles différenciées en fonction des instrumentsLes gestes professionnels dégagés précédemment s’organisent autour de trois postures professionnelles endossées par les enseignants dans le cadre d’activités de programmation. En référence aux travaux de Bucheton (Bucheton, 2014), nous envisageons une posture professionnelle comme une manière cognitive et langagière de s’emparer d’une tâche en fonction des obstacles liés à l’acquisition du savoir ou aux difficultés ressenties par les élèves. 4.2.1. Le contrôle et le support corpsUne première posture observée est celle du contrôle. Pour celle-ci, le pilotage de l’enseignant est très serré et en synchronie, c’est-à-dire que les élèves doivent travailler au même rythme. L’atmosphère est plutôt tendue et hiérarchique (Bucheton et Soulé, 2009). Les gestes professionnels les plus représentés pour cette seconde posture sont ceux de l’aide dans l’activité de programmation. L’enseignant va, par exemple, inciter voire imposer un procédé à suivre, faire avec ou à la place de l’élève ce qui suppose bien une forme de contrôle sur l’activité de l’élève. « Et alors ? qu’est-ce qu’on fait maintenant ? Il faut tourner ? On n’a pas dit de tourner ? [l’enseignante intervient alors corporellement pour replacer l’élève dans le bon sens] » (Extrait captation vidéo, Enseignante M, corps_1). Quelle que soit la place du support dans le processus d’apprentissage, on peut remarquer une prédominance de la posture du contrôle sur le support corps avec une intervention verbale et corporelle davantage marquée des enseignants. 4.2.2. L’accompagnement et le support robotLa posture d’accompagnement se réalise dans le cadre d’un pilotage de classe souple et ouvert et dans une atmosphère détendue et collaborative. L’enseignant apporte une aide de manière ponctuelle individuelle ou collective en fonction des obstacles à surmonter et de l’avancée de la tâche. Il évite de donner la réponse, il provoque les discussions entre les élèves. Il se retient d’intervenir, observe plus qu’il ne parle. Les élèves, quant à eux, sont amenés à faire et à discuter sur ce qu’ils font et donc à s’inscrire dans une posture réflexive et créative (Bucheton et Soulé, 2009). Les gestes professionnels les plus représentés ici sont le rappel (le plus souvent réalisé par l’élève accompagné par l’enseignant), la reformulation et le questionnement. « On n’avait même pas besoin de gérer le groupe, il se gérait tout seul. [...] Y a peut-être des groupes où c’était un petit peu plus difficile donc, ceux-là, plus les accompagner. [...] Un rôle de pilotage. Si on voit que ça ne part pas dans le bon sens on essaie de corriger » (Entretien enseignant V, tablette_2) L’accompagnement dans toutes ses dimensions prédomine sur le support robot. Les enseignants évoquent un pilotage de la classe facilité par ce support qui s’intègre facilement au système de fonctionnement en atelier. L’adoption de cette posture est encouragée par une prise en main facile de l’instrument par les enfants et le système de réglette qui autorise un repérage autonome et aisé de l’erreur par les élèves. « J’ai utilisé la stratégie du recours aux pairs prioritairement et puis après effectivement refaire avec le robot, refaire le parcours avec l’accompagnement de l’enseignant » (Entretien enseignant C, robot_1). 4.2.3. Le lâcher-prise et le support tabletteEnfin, la posture du lâcher-prise se caractérise par un pilotage confié au groupe, avec une atmosphère de confiance et de refus d’intervention du maître. L’enseignant confie aux élèves la responsabilité de leur travail, les autorise à expérimenter et les laisse libres de leurs choix. Les élèves sont, ici, dans une posture réflexive et « du faire » puisqu’ils sont amenés à agir, créer et à développer une réflexion sur leur propre action (Bucheton et Soulé, 2009). Le geste professionnel le plus représentatif de cette posture est la mise en retrait. « J'essaye toujours de me mettre en retrait mais j'essaie que ce soit vraiment les interactions des enfants qui leurs permettent de trouver eux-mêmes les solutions aux problèmes qui leur sont proposés. Donc, moi, je suis là plus pour réorienter leurs réflexions mais j'essaie de pas trop les guider. » (Entretien enseignant MLP_tablette_2) La posture du lâcher-prise est plus prégnante sur support tablette. Le caractère intuitif de ce support mais aussi son format réduit implique une autonomie des élèves et l’adoption par l’enseignant d’un rôle d’observateur, de modérateur. 4.3. Des conceptions de la programmation signe d’une appropriation des instruments par l’enseignantL’analyse des données nous ont également permis d’approcher les conceptions construites par les enseignants à propos de l’enseignement de la programmation en maternelle. Les objets robot et tablettes sont tout d’abord plébiscités pour leurs aspects ludiques, dimension particulièrement importante aux yeux des enseignants intervenants auprès de jeunes élèves. En effet, « jouer pour apprendre » s’inscrit dans les orientations des programmes et recommandations d’enseignement à l’école maternelle qui considèrent le jeu comme essentiel au bon développement physique, psychologique et social de l’enfant (Bulletin officiel n°31 du 30 juillet 2020). Pour autant, selon les enseignants, cet aspect ludique ne serait pas suffisant en lui-même et des objectifs pédagogiques doivent être clairement identifiés. Nous avons dans un précédent article (Bellegarde et al., 2019), mis en évidence la difficulté pour des jeunes élèves de cycle 1 d’adopter, dans un contexte ludopédagogique, une posture de secondarisation (Bautier et Goigoux, 2004). Ils traitent alors les tâches scolaires sans être capables d'en saisir la signification, c'est à dire ce qu'elles leur permettent d'apprendre. On observe chez ces élèves une certaine centration sur « le faire », sur le plaisir de réaliser et réussir l’activité, attitude qui pourrait tout particulièrement être renforcée par une séance ludopédagogique auprès de jeunes élèves de cycle 1. Ainsi, on note chez eux une impossibilité d’énoncer les apprentissages contenus dans les activités de programmation. Une partie des enseignants soulignent d’ailleurs l’importance d’accompagner les élèves dans l’institutionnalisation du savoir afin de permettre aux élèves d’identifier les enjeux cognitifs de la situation d’apprentissage. « Je pense que c’est un outil [le robot] qui est amusant pour les enfants. C’est l’aspect ludique de l’outil qui est intéressant. Cela correspond à notre société de maintenant aussi. Je pense qu’il faut y trouver des objectifs pédagogiques pour l’utiliser. » (Entretien enseignant A, robot_2). « Il faut que l’enfant arrive à se détacher du matériel et à ne pas rester centrer sur le « Blue bot »... il y a des enfants qui ont encore besoin de manipulation et de « toucher » et ça peut être un frein s’il en reste là... c’est à l’enseignant de les aider à passer au-delà. » (Entretien enseignant C, robot_1) Ainsi, conscients que les activités de programmation ne sont pas au programme du cycle 1, les enseignants y voient la possibilité de réinvestir les compétences travaillées dans d’autres domaines d’apprentissage ce qui justifie en soi cet enseignement. On se situe ici dans « programmer pour apprendre », une initiation précoce à la programmation s’inscrivant dans la logique de parcours et de continuité des apprentissages promue par l’école : « Ça leur permet aussi de travailler toutes ces compétences de [...] mise en espace mais réflexif. Ils réussissent à imaginer ce que peut être une forme, une direction sans forcément l’avoir tout de suite sous les yeux. [....] Le fait de développer la logique des élèves, le retour sur la réflexion, etc. » (Entretien enseignant H, robot_1). « Dans les évaluations nationales et celles de notre bassin qui est quand même défavorisé, on voit que dans les évaluations CE1 ce qui pêche, c’est la résolution de problèmes. Donc, je me dis plus tôt on met en place des activités qui vont mettre en route des images mentales, des schémas chez l’élève, plus tôt, on va l’entraîner à ça, plus vite ça portera ses fruits. Et c’est ça la grande force de ce projet, c’est la construction des images mentales, la résolution de problèmes. Il est pas du tout illogique de travailler des compétences de codage puisqu’elles seront reprises des années plus tard. » (Entretien enseignant C, robot_1). Les limites d’initier de jeunes élèves à la programmation sont moins évoquées par les enseignants. La question du rapport entre le niveau cognitif de l’enfant et les tâches à accomplir (notamment les tâches qui ont attrait à l’abstraction), est néanmoins soulevée par un enseignant. Il ne faudrait pas trop anticiper certains apprentissages ou, du moins, ne pas forcer l’entrée dans ces apprentissages, le propre de l’école maternelle étant aussi cette faculté de « laisser du temps » aux enfants, de les préparer aux apprentissages futurs mais sans les anticiper trop prématurément en les mettant en situation d’échec : « Peut-être certains se sentiraient en échec face à ça et ensuite, ça se répercuterait sur différentes activités qu’on leur proposerait pour la suite de leur scolarité. En même temps, j’ai pas vu trop d’élèves en échec sur ce qu’on a fait. » (Entretien enseignant H, robot_1) Le pilotage de la classe à travers l’accompagnement du travail entre pairs constitue, en revanche, une difficulté mentionnée par plusieurs enseignants : « Les inconvénients, c’est que c’est un travail par petits groupes [...]. On doit le faire en dirigé pour le mettre en place, tout au moins au début...parce qu’ils font par essaie-erreur je pense... Donc, ils peuvent peut-être être plus en autonomie mais on sait bien qu’avec certains enfants cela ne va pas être facile à faire. C’est donc plutôt des difficultés de l’ordre du pilotage de la classe. » (Entretien enseignant L, robot_1). Notons également que les enseignants de maternelle n’ont pas été formés à l’enseignement de la programmation ; leurs connaissances théoriques liées aux sciences informatiques apparaissent alors fragiles. « J’ai fréquemment utilisé le mot « programme » mais beaucoup moins les termes « instruction » et « code ». Je pense ne pas être au clair moi-même avec les nuances entre ces termes. » (Carnet de Bord enseignant C, robot_3). 4.4. Comprendre l’influence des médiations cognitives sur la grammaire de l’agir enseignant à partir de la matérialité différente des supportsPrécédemment, nous avons procédé à l’analyse de la grammaire de l’agir enseignant confronté à la mise en œuvre de scénarios pédagogiques d’initiation à la programmation auprès d’élèves de GSM. Nous avons alors analysé leurs gestes, postures et conceptions professionnels construits lors de ces séances dédiées à la programmation. Nous avons ainsi identifié la mise en œuvre de trois postures professionnelles différentes : la posture de contrôle sur support corps, la posture d’accompagnement sur support robot et la posture de lâcher prise sur support tablette. À chacune de ces postures ont été adossés des gestes professionnels particuliers. Maintenant, nous proposons de comprendre plus particulièrement l’influence des instruments en jeu sur cette grammaire de l’agir enseignant à travers les configurations des postures et gestes professionnels observés. La matérialité des instruments constitue un élément de compréhension d’un agir enseignant différencié dans les activités de programmation. A l’instar de Laparra et Margolinas, nous pensons que « la matérialité d’une situation d’apprentissage n’est jamais indifférente » (Laparra et Margolinas, 2016, p. 30), la dimension matérielle des tâches et objets scolaires structurant l’organisation de l’espace de classe et les conduites des élèves et enseignants au sein de cet espace. Le tableau 2 est une représentation synthétique des matérialités propres à chacun des supports pédagogiques appréhendés au travers de leurs dimension tangible (robot et corps) versus virtuelle (tablette), intracorporelle (corps) versus extracorporelle (robot et tablette) et de leur écart à la réalité physique de l’élève (Greff, 2004). Tableau 2 • Matérialités des supports-médiateurs
Dans de précédentes analyses (Bellegarde et al., 2019), nous avons montré les incidences de la matérialité des supports médiateurs sur l’appropriation de la programmation chez des élèves de GSM en termes d’activités cognitives prises en charge et de compétences travaillées par les élèves. Demandons-nous maintenant en quoi la matérialité des instruments peut transformer les qualités de la situation d’enseignement/apprentissage du point de vue de l’enseignant. D’une part, la dimension tangible, caractéristique des modalités corps et robot, a autorisé une intervention de l’enseignant qui peut agir corporellement sur le robot Blue Bot ou l’enfant-robot : par exemple, les repositionner dans le bon sens sur la case « départ ». A l’inverse, la dimension virtuelle du support tablette permet une moindre intervention de l’enseignant sur l’objet qui ne peut être saisi, sur lequel il ne peut influer. « Je les ai laissés libres de manipuler. Je leur rappelais le scénario et puis comme ils étaient en binôme en fait, ils se débrouillaient tout seul. [...] [C’était] du tutorat et puis j’écoutais si la verbalisation était correcte » (Entretien enseignant L, tablette_3) La dimension intracorporelle du support corps est venue également renforcer le positionnement interventionniste de l’enseignant. Les schèmes d’utilisation de ce dispositif à travers un élève qui joue le rôle de l’enfant-robot explique cette posture de contrôle : on observe alors des interventions corporelles et verbales plus marquées pour inciter l’enfant-robot à suivre les instructions données. « Il y a eu un peu plus d’interventions de ma part [...] [sur support corps] puisque là, le robot est faillible par essence puisque c’est un enfant. Donc, j’avais ce rôle de vérificateur. » (Entretien enseignant H, corps_3) Inversement, la dimension extracorporelle des supports robot et tablette, leurs schèmes d’utilisation invitent à une mise en retrait de l’enseignant. « Ces objets pour penser avec » (Papert, 1981, p. 23) inscrivent les élèves dans un contexte de résolution de problèmes, la recherche, le contrôle et le débogage du programme par les élèves, étant facilités par la mise en œuvre du programme par les dispositifs pédagogiques eux-mêmes et le système de réglette adossé. « Le système réglette permet à l’enfant de revoir sa programmation parce qu’elle reste là. [Sans], il n’aurait pas vu le résultat de sa programmation, où est-ce qu’il se serait trompé. [...] Là, au moins, y avait une trace de son essai » (Entretien enseignant W., robot_1). Enfin, l’écart du média à la réalité physique de l’élève vient renforcer la prévalence des postures enseignantes observées sur les trois supports expérimentés lors des activités de programmation. Le dispositif tablette, de par sa taille réduite, apparaît proche de la réalité de l’élève, il la tient entre ses doigts, juste devant ses yeux. A l’inverse, on observe, à travers la grandeur du quadrillage sur support robot et particulièrement sur support corps, un écart plus important entre ces modalités et la réalité physique de l’enfant. Dans le premier cas, l’enseignant se trouve naturellement mis en retrait de l’activité de programmation de l’élève, dans le second, l’enseignant est autorisé à s’impliquer, intervenir dans cette activité. 5. ConclusionDans le cadre de ce travail, nous avons souhaité étudier l’agir enseignant pour disposer, à terme, de clés permettant d’analyser plus finement ses effets sur les apprentissages opérés par des élèves de GSM dans le cadre d’une initiation à la pensée informatique. Cette analyse permettrait par la suite, de montrer dans quelles mesures les gestes et postures de l’enseignant influent sur les pratiques des élèves, mais, également, comment les stratégies et postures d’apprentissages développées par les élèves impactent l’agir enseignant. A l’instar de Bucheton et Soulé, nous envisageons cette dynamique sous le prisme d’un « ajustement réciproque des postures des enseignants et des élèves » (Bucheton et Soulé, 2009, p. 42). Pourrait alors être interrogée, l’influence des instruments en jeu (corps, robot, tablette) sur « cet ajustement réciproque ». Dans le cadre de cette contribution, trois dimensions relatives à la grammaire de l’agir enseignant (gestes, postures, conceptions) ont été étudiées lors d’une initiation à la programmation en GSM. Des configurations différentes de l’agir enseignant ont alors été observées, puis, analysées sous le prisme des matérialités propres aux instruments (corps, robot, tablette) expérimentés en classe (tableau 2, p. 20). Toutefois, dans le cadre de ce projet, nous n’avons pas pu recueillir de données relatives aux enseignants : connaissance de leur culture numérique ou de leur grammaire de l’agir enseignant dans le cadre de leurs activités quotidiennes de classe, par exemple. Ces variables auraient pu être intéressantes à identifier pour comprendre leurs effets sur les pratiques d’enseignement de la pensée informatique auprès de jeunes élèves. En outre, les conditions d’observation avec la présence de caméras et de chercheurs peuvent nécessairement influencer les agir enseignants, ne serait-ce que par le biais des désirabilités sociales qui poussent tout un chacun à se montrer sous son meilleur jour. Ainsi, les enseignants observés et interviewés sont probablement conscients de ce contexte particulier qui peut potentiellement influer sur leurs gestes et postures professionnels. Cela nous invite donc à éprouver et repenser nos protocoles pour de prochaines expérimentations. Inscrire les observations sur de plus longues durées pourrait, par exemple, constituer une manière d’atténuer les effets de la présence du chercheur sur le terrain et donc leurs influences sur les pratiques de classe de l’enseignant. Nos analyses ouvrent néanmoins des perspectives qu’il conviendrait à présent d’investiguer davantage. En effet, au démarrage de ce travail, nous avons fait l’hypothèse que le support robot conduirait particulièrement à une mise en retrait de l’enseignant au profit d’apprentissages autodirigés chez les élèves. Nos premières analyses nuancent ce positionnement supposé de l’enseignant. Nos observations relèvent tout d’abord la manière dont les Environnements Informatiques d’Apprentissage Humains (EIAH), ici, les modalités robot et tablette numérique, constituent des sources de guidance pour l’élève, une aide à la résolution de problèmes. La mise en œuvre du programme par les environnements eux-mêmes, les traces sur l’activité de l’élève et les feed-back procurés par le système de réglette accompagnent l’apprenant dans une réflexion sur sa propre action, favorisent une révision et réussite de sa tâche (Bellegarde et al., 2019). Il en résulte pour l’enseignant une facilitation de sa tâche d’accompagnement des élèves dans les activités de programmation et l’adoption, chez ces praticiens, de gestes et postures professionnels qui laissent une place aux interactions entre les systèmes informatiques et les sujets-apprenants, autorisant chez les élèves de GSM une construction active de leurs savoirs. À l’inverse, nous avons montré que, sur support corps, l’enseignant ne disposant de systèmes informatiques de guidage des apprentissages, se trouve dans la nécessité de guider, de contrôler lui-même, l’activité de l’élève ; une posture plus interventionniste a ainsi été observée dans le cadre de la recherche Blue Bot. Nous avons également montré à travers la matérialité des supports que, même si le robot procure à l’enfant des possibilités de décentration, de manipulation de l’objet-robot intéressantes, sa dimension tangible et son écart à la réalité physique de l’élève structurent l’agir enseignant autour de gestes professionnels relevant de la posture d’accompagnement. La matérialité du support robotique autorise l’intervention de l’enseignant et moins sa mise en retrait. C’est alors la dimension virtuelle de la tablette et sa proximité à la réalité physique de l’élève qui encouragent l’adoption de la posture du lâcher-prise chez l’enseignant. À l’instar de Laparra et Margolinas (Laparra et Margolinas, 2016), ces analyses semblent révéler l’intérêt à porter à la matérialité des tâches et objets scolaires, et, notamment, celle des EIAH, dans l’optique de comprendre la manière dont elle peut transformer les qualités des situations scolaires et ainsi influer sur l’agir enseignant. Ces éléments mettent en évidence les enjeux de formation et d’accompagnement des enseignants relatifs à l’introduction des EIAH et des sciences informatiques à l’école.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
Référence de l'article :Katell BELLEGARDE, Julie BOYAVAL, Julian ALVAREZ, Initier des élèves de maternelle à la robotique/informatique : quand les supports médiateurs impactent la grammaire de l’agir enseignant, Revue STICEF, Volume 28, numéro 3, 2021, DOI:10.23709/sticef.28.3.5, ISSN : 1764-7223, mis en ligne le 25/03/2022, http://sticef.org |
|||||||||||||||||||||||||||||||||||||||||||||||||||||


© Revue Sciences et Techniques de l'Information et de la Communication pour l'Éducation et la Formation