de l´Information et
de la Communication pour
l´Éducation et la Formation
version à télécharger (pdf)
Volume 18, 2011
Rubrique
|
Contact : infos@sticef.org |
Utilisation de la robotique pédagogique pour enseigner l'intelligence artificielle : une expérience d'approche par projet auprès d’étudiants en informatique
1. IntroductionL’informatique, comme la plupart des disciplines scientifiques, souffre du manque de motivation des jeunes à étudier les sciences. En conséquence, il convient de trouver et d’élaborer des parcours pédagogiques plus attractifs et plus adaptés aux étudiants. L’intelligence artificielle (Brooks, 1991), (Russell et Norvig, 2009), branche de l’informatique, subit également cette désaffection. L’enseignement de matières scientifiques à forte valeur technologique dans des domaines pointus et innovants, et notamment l'intelligence artificielle, doit évoluer de pair avec son objet et exige donc une remise en cause fréquente de sa forme et de son contenu. Mais enseigner l’intelligence artificielle à des étudiants de licence pose des difficultés; étant donné la grande diversité des problématiques qui la composent, il est difficile d’éviter qu’un cours d’introduction ne se transforme en catalogue de techniques. Nous avons fait l'hypothèse qu'une approche orientée projet robotique, où les apprenants sont actifs et où les conséquences de leurs décisions sont clairement visibles peut être plus stimulante pour des étudiants déjà intéressés par cette discipline. 2. Analyse de la situation actuelle et présentation de la problématique2.1. La pédagogie par projetL’origine de la pédagogie par projet provient de la formation d’étudiants en médecine (Martin, 1996) mais trouve également des applications dans d’autres domaines comme les mathématiques ou encore la physique (Duch, 1996). L’approche par projet favoriserait l’apprentissage des étudiants à travers la réalisation d’une production à partir d’un cahier des charges. Cette production est le plus souvent réalisée collectivement et met en pratique le travail collaboratif, la gestion de projet, le travail professionnel et la synthèse des acquis. (Lauzier et al., 2007) soulignent qu'il ne s'agit pas seulement de placer l'apprenant dans une situation réelle mais de faire en sorte qu'il se lance dans une démarche active de résolution de problème. L'apprenant va ainsi adopter une approche scientifique et faire ses propres découvertes (Mayer, 2004). Au-delà de la notion de pédagogie par projet, c'est celle de projet intégrateur qui est mise en avant par la recherche (Boudreault et Pregent, 2005), (Haudiquet, 2007). Il s'agit de proposer aux apprenants un environnement d'apprentissage nécessitant l'application de notions enseignées dans différents cours, ce qui permet d'augmenter la perception de la pertinence des cours par les étudiants. Ils ne vont pas seulement appliquer une série de procédures et de contenus mémorisés mais procéder à une recherche de solution en prenant appui sur les acquis théoriques qui seront réinvestis dans cette situation problème (Tardif, 1997). Plusieurs études ont ainsi montré que ce type de pédagogie entraînait un effet positif sur l’assimilation des connaissances (George, 2001), (Leroux, 2005). Dans le cadre d’un apprentissage complexe et très technique comme celui de l'intelligence artificielle, la mise en place d'une pédagogie de projet pour favoriser l'intégration des apprentissages et l'implication des apprenants semble particulièrement intéressante. Comme le souligne (Viau, 1997) « pour augmenter la motivation de ses élèves, l'enseignant doit amener ceux-ci à établir des relations entre ce qu'ils savent déjà et la matière qu'il leur enseigne et à résoudre des problèmes qui leur permettront de mieux comprendre la réalité qui les entoure. Le principe sur lequel ces suggestions reposent est simple : plus l'enseignant invite les élèves à jouer un rôle actif et dynamique en classe, plus ils seront motivés à s'engager dans les activités qu'il leur propose ». 2.2. La robotique pédagogique comme environnement d'apprentissage2.2.1. GénéralitésLa robotique pédagogique est une approche éducative qui s'appuie sur la robotique pour introduire des connaissances. Son objectif est de viser principalement "l'acquisition d'habiletés générales et de notions scientifiques dans des domaines comme les sciences expérimentales et la technologie. Elle se caractérise par un usage de l'ordinateur dans ses fonctions de scrutation, d'analyse, de contrôle et de modélisation de différents processus physiques" (D'Amour, 1990). Trois approches différentes sont prises en compte (Leroux, 1995) : - l'approche lunette cognitive de (Nonnon, 1989) qui s'appuie sur l'Expérimentation Assistée par Ordinateur permettant à l'apprenant d'appréhender le phénomène à l'étude d'une manière plus sensorielle et plus globale ; - l'approche technologique, proche des réalités industrielles et où l'apprenant doit apprendre à contrôler, piloter des systèmes techniques ; - l'approche micromonde de (Papert, 1981) qui conduit les apprenants à construire leurs connaissances grâce à un monde constitué de micro-robots pilotés par des ordinateurs. Cette dernière approche est directement liée aux théories constructivistes Piagetienne (Piaget, 1970) et Vygotskienne (Vygotski, 1978) qui accordent une place centrale aux représentations symboliques de l'apprenant comme outil d'articulation du réel et du théorique. Au départ, les travaux en robotique pédagogique ont d'abord tenté d'exposer les bénéfices de l'utilisation d'un environnement pédagogique informatisé pour l'enseignement et l'apprentissage. Ils s'adressent principalement à des non-initiés les ouvriers ou les élèves de collège (B.O., 1999) afin de les familiariser aux automatismes pilotés par ordinateur, à l’informatique et à la programmation. L'objectif annoncé est la découverte de la technologie et de l'informatique et l’acquisition de savoirs et savoir-faire de base. Plus récemment, les recherches se sont intéressées à des publics d'experts, techniciens en entreprise ou d’étudiants dans un cursus technique (Dayot et Tanguy, 2005), (Denis, 1993), (Levy et Mioduser, 2010). Dans ce contexte, le choix d'un environnement pédagogique informatisé pour l'enseignement de l'informatique s'appuie sur le constat suivant : les méthodes traditionnelles d'apprentissage de l'informatique et de la programmation ne sont pas adaptées car trop complexes (Meurice de Dormale, 1997). Traditionnellement cet apprentissage est réalisé dans une situation de classe de type papier-crayon, donc extrêmement abstraite. Les élèves ne possédant pas les capacités d'abstraction nécessaires peuvent échouer ou éprouver des difficultés à maîtriser ces compétences (Vivet, 1989). L'intérêt de l'utilisation du robot comme méthode d'apprentissage prend alors tout son sens. L'idée est de permettre aux apprenants de passer d'un texte statique à une exécution dynamique, d'un mode de raisonnement opératoire concret vers un mode de raisonnement opératoire formel (Nonnon, 2002), (Hueber et Urban, 2009). Enfin, la question de l’implication des élèves dans leurs activités d’apprentissage est toujours difficile à appréhender. On craint souvent un découragement des apprenants lors d’échecs répétés en programmation. Les expériences menées par (Leroux, 1996) avec des publics d'adultes montrent qu’ils ne se découragent pas et qu'ils tendent à atteindre leur objectif : faire se mouvoir leurs robots. Les supports pédagogiques comme les micro-robots sont donc particulièrement intéressants notamment pour les apprentissages complexes et peu attractifs comme l'intelligence artificielle, puisqu'ils facilitent l'implication des apprenants en la rendant quasiment naturelle (Dayot et Tanguy, 2005), (Levy et Mioduser, 2010). 2.2.2. Exemples d'applicationsPlusieurs recherches ont porté sur l'utilisation des robots Lego Mindstorms notamment dans le cadre de l'apprentissage de l'intelligence artificielle, auprès d'étudiants de l'enseignement supérieur (Parsons et Sklar, 2004). Ces robots permettent de conserver l’intérêt de la robotique tout en s’appuyant sur des composants modulaires déjà opérationnels qui permettent d’aller plus loin. En effet, si le système créé ne fonctionne pas, c’est que l’idée implémentée est à revoir car il est peu probable que le matériel dont la robustesse et la fiabilité sont reconnues puisse poser problème. L’expérience montre que les étudiants prennent en main cet outil rapidement car bien souvent il leur est familier : qui n’a jamais joué avec des Lego ? Ainsi, leur ingéniosité peut se manifester bien plus tôt qu’avec d’autres types de projets ; ce qui facilite leur aboutissement et par conséquent place les étudiants dans une dynamique de réussite. En 1989, Martin créa le MIT Robot Design Project où les étudiants abordaient les bases de la robotique en construisant en robot et en les affrontant lors d'une compétition qui se déroulait en fin d'année. Quelques année plus tard, (Mataric, 1998) a développé un micro contrôleur capable de fonctionner avec des Lego Mindstorms. D'autres matériels sont utilisés comme le Fisher-Tecknik (Vivet et al., 1997) qui permettent d'enseigner les rudiments de la programmation à des collégiens ou des adultes en formation professionnelle. (Nonnon, 2002) a également testé l'impact de la robotique pédagogique dans la formation de base en science et technologie. L'enseignement était destiné à des élèves en école d'ingénieurs mais également à des étudiants en formation professionnelle initiale et continue peu intéressés par les disciplines scolaires et davantage ancrés dans la réalité technique du terrain (Parmentier, 1992). 2.3. Objectifs de la rechercheSi l'efficacité de l'utilisation de robots dans l'apprentissage peut être considérée comme raisonnablement étayée par des résultats de recherche, de nombreuses zones d'incertitude demeurent. En particulier, les recherches se sont jusqu'ici peu penchées sur les enjeux des situations d'apprentissage et sur la validation de leur efficacité (McNerney, 2004). Nous pensons que ces robots doivent faire l'objet de recherches visant à mieux comprendre quelles sont leurs possibilités éducatives. L’étude présentée ici a étudié comment la programmation de robots pouvait contribuer à l'apprentissage de l'informatique en général et de l'intelligence artificielle en particulier. Dans un premier temps, nous présenterons le principe et le déroulement des différents projets informatiques mis en place. Ceux-ci ont été pensés de telle sorte que le cadre et les activités proposées soient au plus proche des pratiques réelles en entreprise. De plus, l’accent a été mis sur les aspects communication et finalité sociale du projet dans le but d’impliquer et de motiver au maximum les étudiants dans sa réalisation. Dans un second temps nous nous sommes intéressés à l’impact de ces projets de robotique pédagogique sur la satisfaction et la motivation des étudiants. Pour ce faire, nous leur avons soumis en fin de cours un questionnaire permettant de faire le point sur leurs impressions aussi bien sur les aspects organisationnels du projet, que sur leur capacité à travailler en équipe, leur satisfaction du travail accompli ou encore leur investissement dans le projet. En nous appuyant sur les travaux de Keller, nous avons supposé que les projets robotiques seraient plus attractifs et qu’ils inciteraient les apprenants à participer plus activement (Keller et Burkman, 1993). Au-delà de l’aspect « amélioration des performances », ils permettraient de capter l’intérêt des étudiants et de leur faire percevoir leur formation comme un ensemble cohérent plutôt que comme un ensemble disjoint d’unités d’enseignement. Nous avons donc mené une étude de type exploratoire sur les activités des étudiants pendant un semestre. 3. Mise en œuvre de projets informatiques3.1. OrganisationDurant leur cursus au sein de la licence MIA (Mathématiques, Informatique et Applications), les étudiants de deuxième (L2) et troisième années (L3) ont la possibilité de réaliser un projet informatique. L'organisation des modules correspondants est identique pour les deux années ; les projets se déroulent pendant tout le second semestre (dont la durée est de 12 semaines) et ils sont à réaliser en groupes de 4 étudiants. Chaque groupe est encadré par un membre de l’équipe pédagogique. Afin d’assurer un suivi régulier, les étudiants rencontrent leur encadrant de manière hebdomadaire. Sur l’ensemble du semestre, le temps à consacrer au projet correspond au minimum à 72h pour les L2 et 144h pour les L3. Par ailleurs, la maquette des enseignements de la formation accorde 5 et 10 crédits ECTS (European Credits Transfer System) aux modules correspondant à ces projets. Les projets s’achèvent par une soutenance et la remise d’un rapport. En substance, le déroulement du semestre vise à reprendre le cycle de vie d’un projet. 3.2. Déroulement des projets3.2.1. La phase préalableLa phase préalable débute par une réunion d’information qui a lieu 3 semaines avant la fin du premier semestre. Au cours de celle-ci, on présente en détail le fonctionnement du module ainsi que l’ensemble des sujets proposés. Les étudiants ont alors 2 semaines pour constituer une équipe de 4 étudiants souhaitant travailler ensemble. Chaque équipe doit alors rendre une fiche de vœux sur laquelle les étudiants ont classé tous les sujets qui leur ont été proposés par ordre de préférence. À l’issue de cette phase, les sujets sont attribués de manière à satisfaire au mieux les souhaits exprimés par chaque équipe. En pratique, il est rare qu’un groupe se voie affecter un projet situé au-delà de son 3ème vœu. Cette démarche, consistant à tenir compte des vœux des étudiants, vise à s’assurer qu’ils sont intéressés par le projet sur lequel ils vont travailler tout au long du semestre. 3.2.2. La phase d’analyseElle est particulièrement critique car elle conditionne le bon déroulement et la réussite du projet. L’objectif est de guider les étudiants afin qu’ils adoptent une démarche qualité ; celle-ci s’avère nécessaire si l’on souhaite que le résultat corresponde de manière satisfaisante aux besoins exprimés par le maître d’ouvrage. Pour y parvenir, les étudiants partent d’un énoncé informel qui donne les contours du besoin de la maîtrise d’ouvrage et qu’ils complètent au cours du premier entretien avec leur encadrant. Ils peuvent aussi réaliser une analyse de l’existant (en interne ou en externe) et la compléter par des recherches d’informations auprès d’experts du domaine applicatif (par exemple : les futurs utilisateurs du logiciel). Ainsi les étudiants listent les résultats attendus en termes de fonctionnalités (en y mettant des priorités) et de qualités (performance, robustesse, maintenabilité, sécurité, extensibilité) et sous le contrôle de leur encadrant, ils établissent le cahier des charges et le cahier de recette. Cette étape est pédagogiquement importante. Elle oblige les étudiants à se mettre à la place de la maîtrise d’ouvrage. La conséquence attendue est de leur permettre de mieux comprendre ce que l’on attend d’eux. En outre, cela leur permet (en partie) de négocier le périmètre fonctionnel de leur application ; ils peuvent alors proposer des fonctionnalités supplémentaires, hiérarchiser l’ensemble des fonctionnalités et estimer les difficultés de mise en œuvre. L’objectif de cette négociation est de faire en sorte que chaque groupe se retrouve en situation de succès à la fin de son projet et ce, quel que soit son niveau (pour peu qu’il satisfasse aux consignes). 3.2.3. La phase de développementLa phase de développement comprend l’ensemble des étapes et processus qui permettent de passer de la conception à une application fonctionnelle et fiable. C’est au cours de cette phase que les étudiants sont confrontés à la programmation et à la réalisation concrète de l’ensemble des livrables logiciels de leur projet. Il s’agit alors pour eux de mettre en œuvre leurs connaissances et leurs compétences. Si le sujet est plus technique, ils devront alors en acquérir de nouvelles. Dans ce cas, l’encadrant peut les guider. Cette phase se termine par un ensemble de tests visant à vérifier le bon fonctionnement de l’application développée. 3.2.4. La phase de présentationLa phase de présentation consiste pour les étudiants à mettre en valeur le travail réalisé tout au long de leur projet. Elle revêt plusieurs aspects. Tout d’abord, avec leur encadrant, ils vont procéder à la recette de leur application : cela consiste à vérifier ensemble qu’elle répond aux besoins initialement exprimés puis à réaliser la livraison. Ensuite, ils doivent préparer leur soutenance en mettant en avant le travail réalisé (les soutenances sont publiques). Dans le même temps, ils doivent compléter la page wiki dédiée à leur projet. Ils doivent y rendre accessible à tous l’ensemble de leur projet (code, documentation, exécutables). En outre, pour enrichir cette page, il leur est demandé de réaliser quelques vidéos de démonstration présentant le résultat de leur travail. Enfin, ils doivent rédiger un rapport de projet. Il y est attendu qu’ils prennent du recul par rapport à leur réalisation ainsi qu’au cheminement qui les y a menés. Il leur est conseillé d’analyser les points positifs et les points négatifs de l’ensemble de leur travail afin qu’ils en tirent des enseignements et qu’ils ne reproduisent plus les erreurs qu’ils ont pu commettre. En ce qui concerne les groupes de robotique, il leur a été demandé d’effectuer un certain nombre de démonstrations au sein de l’UFR à destination des autres étudiants ainsi que dans le cadre de manifestations, par exemple cette année les Journées Numériques de Paris Descartes ou encore des salons d’étudiants (cf. §4.5). 3.3. Le rôle de l’encadrantTout au long du semestre, l’encadrant joue le rôle du maître d’ouvrage. Il intervient également pour suivre l’évolution du projet ; les étudiants étant notés individuellement, il est essentiel de déterminer le rôle et la contribution de chacun. Évidemment, en tant que membre de l’équipe pédagogique, l’encadrant a aussi un rôle de conseil et d’assistance. Son expertise du domaine applicatif lui permet d’orienter les étudiants vers les ressources adéquates et de corriger les initiatives inadaptées risquant de conduire à un échec. 3.4. Les outilsAfin d’améliorer la qualité des projets rendus et la qualité des apprentissages, plusieurs outils ont été mis à la disposition des étudiants. 3.4.1. DokuwikiUn wiki a été mis en place afin de regrouper toutes les informations utiles aux étudiants et aux encadrants sous la forme d’un site web. Il est organisé en 7 rubriques, donnant des informations sur la marche à suivre et regroupant les ressources utiles. Les étudiants doivent y présenter le rendu final de leur projet selon un modèle imposé. 3.4.2. SubversionSubversion (SVN) est un système de gestion de versions open-source. Son principe de fonctionnement est celui d’un dépôt de fichiers unique et centralisé. L’ensemble des fichiers est stocké dans une base de données. Étant accessible par le réseau, il permet aux étudiants d’intervenir sur leur projet à distance. Ce genre d’outil, largement utilisé par les professionnels, est indispensable à tout projet d’envergure. En effet, il permet de gérer de manière collaborative le code source d’un projet. Il conserve l’historique des modifications apportées aux différents fichiers stockés, permet de gérer plusieurs versions de chaque fichier et gère les conflits lorsqu’un même fichier est modifié par deux personnes différentes au même moment. Il permet d’aborder de manière simple une notion fondamentale en génie logiciel : la non-régression de l’application. C’est-à-dire qu’à chaque évolution du code source (mineure ou majeure) on doit pouvoir garantir qu’il n’y a pas de régression comportementale ou fonctionnelle. Dans le cas contraire, il suffit de revenir à une version antérieure qui fonctionnait de manière plus satisfaisante. 3.4.3. PLENADISD’autre part, une plateforme support déjà existante: PLENADIS (Parchemal et Baron, 2010) a également permis d’encadrer ces projets. PLENADIS est une plateforme de travail collaboratif de l’université Paris Descartes utilisée par les 1400 étudiants de l’UFR Mathématiques et Informatique. Un espace de travail est disponible sur la plateforme pour tous les groupes de travail des différentes formations: groupes de cours, groupes de travaux dirigés et groupes de projets. Dans chacun de ces espaces, des fonctionnalités synchrones (chat, éditeur partagé, tableau blanc) et asynchrones (forum, dépôt de documents, envoi de courriels) sont disponibles. Les équipes de projet utilisent la plateforme PLENADIS pour les usages suivants: dépôt des documents exigés comme les comptes-rendus des réunions hebdomadaires, le rapport final et des documents intermédiaires importants demandés par l’enseignant encadrant. Ils l’utilisent également pour partager des documents de travail, discuter et travailler en ligne en particulier quand ils ne sont pas tous présents à l’université. 3.4.4. Les Lego MindstormsPour les projets de robotique, cinq robots ont été mis à disposition des étudiants. Ces Lego Mindstorms possèdent un microprocesseur de 32 bits ARM7. Ils offrent la possibilité de communiquer sans-fil par Bluetooth ou via un port USB 2.0. Plusieurs capteurs sont également fournis et peuvent être connectés sur 4 ports d’entrée. Les capteurs disponibles sont les capteurs de distance à ultrasons, de lumière et couleurs, une caméra (avec suivi de cible), un capteur d’intensité sonore, une boussole, un gyroscope, un capteur infrarouge et un capteur de toucher. Il existe également trois ports de sortie pour les moteurs, un écran à cristaux liquides et une alimentation par six piles de 1,5V. 4. Bilan d'étape4.1. Les sujets proposésDans le cadre de ces modules de projets, les étudiants de 2ème année ont eu à choisir parmi 11 sujets tandis que ceux de 3ème année ont eu à choisir parmi 10 sujets. Afin de faciliter la mise en œuvre des modules correspondants et l’évaluation des étudiants, les sujets sont dédoublés; c’est-à-dire qu’un même sujet peut être affecté à deux groupes différents. Pour l’année universitaire 2009-2010, parmi les sujets proposés, trois sujets visaient l’utilisation des robots comme support :
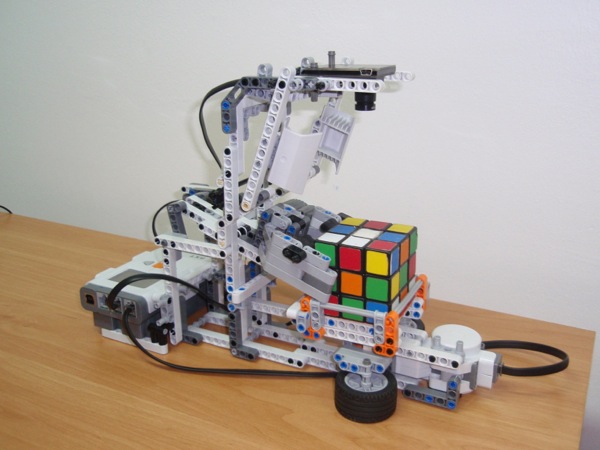
Un robot gyropode (L2). Inspiré du Segway, ce projet consiste à faire en sorte que le robot puisse rester en équilibre afin de se déplacer en toute sécurité dans son environnement (cf. figure 1). Un solveur de Rubik’s Cube (L3). Ce projet consiste à faire en sorte que le robot puisse percevoir et résoudre n’importe quel Rubik’s cube (cf. Figure 2). Une librairie graphique de développement d’interface de commande de robots (L3). Ce projet vise à développer un ensemble de composants graphiques pour concevoir rapidement une interface graphique pour un robot ; quels que soient ses capteurs et ses moteurs. Ces sujets ont été plébiscités car 80% des étudiants les ont classés dans les trois premiers choix de leur fiche de vœux. 4.2. Les difficultés théoriquesLes sujets proposés induisaient certaines difficultés théoriques à différentes étapes de la réalisation du projet : de la conception à l'implémentation. 4.2.1. La modélisation du problèmeIl s'agit d'une étape cruciale qui vise à identifier les données et à déterminer les traitements qui vont pouvoir être réalisés. En effet, l'organisation des données détermine les algorithmes qui vont pouvoir être utilisés et par conséquent, elle influence sur le temps de traitement. Ainsi, la représentation du Rubik's Cube doit être bien réfléchie si l'on souhaite que la résolution puisse se faire dans un temps raisonnable. De la même manière, dans le cas du robot gyropode, il faut bien comprendre qu'il s'agit d'un problème de pendule inversé.
Figure 2 • Le robot solveur de Rubik's Cube 4.2.2. L'architecture logicielleIl s'agit d'une étape de la conception visant à définir les grands ensembles fonctionnels de l'application. Pour certains d'entre eux, il est parfois souhaitable d'utiliser des composants logiciels réutilisables car ils permettent un gain de temps important lors de la phase de développement. Toutefois, si l'on souhaite pouvoir les intégrer sans difficulté dans un projet, il faut maîtriser leurs spécificités dès la conception. D'autre part, lorsqu'on développe des composants logiciels réutilisables il faut envisager un cadre d'utilisation général ; c'est une tâche complexe car il est impossible d'anticiper toutes les situations. Par conséquent, la réalisation de composants graphiques permettant une conception rapide d'interface graphique pour un robot nécessite une bonne compréhension des problèmes de conception et d'intégration. 4.2.3. L'algorithmiqueAu niveau algorithmique, les projets proposés abordaient des problèmes classiques en robotique et en intelligence artificielle. Par exemple, le robot gyropode nécessite une bonne compréhension du mécanisme de boucle d'asservissement sans laquelle le robot ne pourrait pas tenir en équilibre. Il s'agit d'une interaction entre un capteur et un système de commande visant a un comportement optimal de ce dernier. Dans le cas du Rubik's Cube, un algorithme de résolution doit trouver une solution unique parmi plus de 43x10^18 combinaisons possibles. Aussi, si l'on souhaite obtenir une solution en un temps raisonnable, la complexité de l'algorithme doit être soigneusement étudiée. 4.2.4. L'implémentationL'implémentation est la dernière étape de réalisation d'une application. Elle consiste à traduire les algorithmes en langage de programmation. Les projets proposés ont permis d'aborder un point essentiel : l'influence de la boucle critique sur le temps d'exécution du programme. La boucle critique est un ensemble d'instructions nécessairement répété à de très nombreuses reprises afin de procéder aux traitements dont le programme a la charge. Ainsi, une mauvaise implémentation peut ralentir de manière dramatique son fonctionnement (proportionnellement à la complexité de l'algorithme utilisé). Par exemple, dans le cas du robot gyropode, un temps de traitement trop long risque d'entraîner sa chute. Et dans le cas du solveur de Rubik's Cube, la résolution pourrait prendre plusieurs heures. 4.3. Les difficultés pratiquesOutre les difficultés théoriques, plusieurs difficultés d’ordre pratique ont également été rencontrées. La première est celle d’un taux d’occupation de la salle de robotique de 100 %. En effet, comme indiqué dans le paragraphe précédent, les étudiants avaient chacun plusieurs créneaux dans la semaine pour disposer de leur robot dans une unique salle mais ne pouvaient pas réaliser de tests sur le robot en dehors de ces périodes. Il a fallu faire appel à une modélisation numérique du problème afin de pouvoir tester virtuellement les solutions avant de passer à la pratique sur le robot. La décharge des batteries a également posé problème. En effet, on peut observer une baisse de la tension délivrée par les batteries au bout de 15 minutes d'utilisation. Cette baisse altère les performances des moteurs, ce qui présente un risque pour le maintien de l'équilibre du robot gyropode. Afin de pallier à cela, il est donc nécessaire de la prendre en compte. La solution mise en œuvre par les étudiants consiste à implémenter dans leur programme une estimation de la décharge qui entraîne une modification des commandes envoyées aux moteurs. La précision et la sensibilité des capteurs ont également été prises en compte. Par exemple, la capture des couleurs des carrés d’un Rubik’s cube est très dépendante des conditions d’éclairage. Ainsi, une solution alliant un apprentissage et une aide à la correction manuelle a été mise en œuvre. La plupart de ces solutions ont été apportées par les étudiants eux-mêmes, montrant ainsi leur ingéniosité et leur capacité à intégrer des connaissances connexes. 4.4. Valorisation des projetsLa valorisation des projets réalisés a pris plusieurs formes. Tout d’abord, les étudiants ont été conviés à effectuer des démonstrations devant différents publics et dans différents contextes. Un second type de valorisation a été également effectué par les étudiants sur les réseaux sociaux. Plusieurs photos et vidéos réalisées par les étudiants ont été diffusées sur des sites internet tels que YouTube et Facebook. Il est difficile d’évaluer l’impact de ce type de communication. Toutefois, il est certain que les vidéos ont eu un certain succès puisque certaines d’entre-elles ont été visionnées plus de 600 fois à ce jour ; c’est-à-dire environ un mois après leur mise en ligne. Enfin, le travail réalisé par les étudiants est valorisé via des supports plus classiques comme la médiathèque de l’Université Paris Descartes où les vidéos des démonstrations sont accessibles à tous. 4.5. L'opinion des étudiantsUn questionnaire concernant leur ressenti a été remis aux étudiants à la fin de leur projet. Il s'agissait d'une prise d'informations subjectives, à partir de laquelle il n'est pas possible de généraliser. Cependant, un certain nombre de résultats nous semblent intéressants quand on contraste les réponses de ceux ayant mené un projet robotique (15) et les autres (75). Ces deux populations sont équivalentes en ce qui concerne l’expérience préalable dans la réalisation d’un projet informatique. Environ la moitié des étudiants questionnés ont déjà participé à ce type de projet. Pour ce qui est de la gestion du planning, la majorité estime avoir plutôt bien géré son planning. Toutefois, les étudiants impliqués dans les projets robotiques jugent qu’ils l'ont mieux tenu que les autres (25 %) qui pensent l'avoir plutôt mal géré. À la question : "Votre groupe a t’il atteint les objectifs fixés ?", plusieurs étudiants de projets non robotiques considèrent qu’ils ne les ont pas atteints alors que ce n'est pas le cas pour l'autre groupe. À la question : "Votre groupe a-t-il travaillé efficacement en équipe ?", un grand nombre de ceux qui ont mené des projets non-robotiques jugent que ce n'est pas le cas. En revanche, la majorité des autres pensent que leur travail a été efficace. Ceci peut s’expliquer par le fait que les groupes de projets robotiques avaient un fort intérêt pour leur sujet, ce qui n'est pas toujours le cas pour les autres. Cette hypothèse semble confirmée par les réponses à la question : "Pensez vous qu’il y avait une bonne ambiance dans votre groupe ?" et par la question : "Êtes vous satisfait du travail réalisé par le groupe ?". À la première et à la seconde question, la quasi-totalité des étudiants en robotique ont estimé avoir travaillé dans une bonne ambiance et tous se sont dits satisfaits alors qu'une part moins importante des autres étudiants avait trouvé une bonne ambiance dans le groupe et se dit satisfait. Ces résultats corroborent les observations préalablement obtenues dans des expériences similaires d’apprentissage par projet. 5. Discussion et perspectivesNotre objectif initial était de démontrer la faisabilité des projets de robotique au sein de notre établissement. Cette expérience s’est révélée encourageante. Nous avons même eu la surprise de constater que certains étudiants ont montré une implication émotionnelle pour le robot dont ils avaient la charge en lui donnant un nom, en le personnalisant, etc. Nous avons pu constater que les étudiants de licence sont venus nombreux pour assister à la présentation des résultats obtenus par les équipes ayant travaillé sur des robots. Cela nous a amenés à considérer que les démonstrations pourraient inclure d’autres projets que les seuls projets de robotique. À ce stade, il n'est pas possible d’évaluer rigoureusement les résultats de tels projets. En effet il est difficile de déterminer qui a appris quoi, quand, comment, étant donné la diversité des sujets proposés. Néanmoins, on peut tout de même constater les progrès réalisés dans certains domaines comme par exemple la méthodologie employée. En outre, par rapport à nos objectifs initiaux, il faudrait plusieurs années avant de pouvoir vérifier si les étudiants ayant travaillé avec des robots obtiennent de meilleurs résultats ou s’ils poursuivent leur cursus dans un parcours du master lié à l’un de leurs projets. Cependant, nous estimons que nous avons atteint un certain nombre de buts : - Intéresser les étudiants au domaine de l’intelligence artificielle aux travers des différentes thématiques qui la composent. - Rendre plus attractives les formations d’informatique au sein de l'université Paris Descartes. Ce point peut sembler en dehors du domaine de la pédagogie, pourtant il nous semble corrélé à la motivation des étudiants. - Favoriser les collaborations scientifiques entre chercheurs de l’U.F.R. de Mathématique et d’Informatique. Désormais, nous réfléchissons à la possibilité de passer à l’échelle car nous souhaiterions qu’un plus grand nombre d’étudiants puisse travailler avec des robots. À ce jour, il nous semble que cela pourrait être réalisé de deux manières différentes ; soit en augmentant le nombre de projets de robotique, soit en proposant des travaux pratiques transversaux. Ainsi, avec quelques robots supplémentaires, il serait possible de toucher toute une promotion. La conclusion de ces travaux pratiques pourrait être une compétition entre les différentes implémentations des différents groupes sur des robots identiques. En outre, nous envisageons l’acquisition de robots plus sophistiqués à destination des étudiants de Master afin de les confronter à des situations nécessitant une maîtrise de l’état de l’art. 6. RemerciementsNous tenons à remercier : l’Université Paris Descartes qui, au travers des projets d’innovation pédagogique, a permis l’acquisition du matériel de robotique ; l’UFR de Mathématiques-Informatique qui a mis à notre disposition une salle dédiée à la robotique; ainsi que nos collègues qui ont encadré l’ensemble des projets de licence. BIBLIOGRAPHIE ET WEBOGRAPHIEBOUDREAULT Y., PREGENT R. (2005) Projet intégrateur pluridisciplinaire exploitant la robotique pour les étudiants de première année en génie informatique et en génie logiciel. 8e colloque francophone de Robotique Pédagogique La Ferté-Bernard, France. BROOKS R. A. (1991) Intelligence without representation. Artificial intelligence, 1991, Vol. 47, n°1-3, p. 139–159. D'AMOUR P. (1990) Avant-propos. Robotique Pédagogique, Les actes du IIe congrès international. Montréal, Canada, 1990. DAYOT L., TANGUY R. (2005) Application de la robotique pédagogique au sein d’une association de vulgarisation scientifique. Skholê. 2005, Vol. hors-série 2, p. 33-45. DENIS B. (1993) Les animateurs développent-ils une pédagogie constructiviste en robotique pédagogique ? Regards sur la robotique pédagogique - Actes du 4ème colloque international sur la robotique pédagogique, 1993. DUCH B. J. (1996) Problem-Based Learning in Physics: The Power of Students Teaching Students. Journal of College Science Teaching. 1996, Vol. 15, n°5, p. 326–29. GEORGE S. (2001) Apprentissage collectif à distance, SPLACH : un environnement informatique support d'une pédagogie de projet. Thèse de doctorat. Le Mans : Université du Maine, 2001. HAUDIQUET H. (2007) Utilisation de la robotique pédagogique dans le cadre des enseignements de l’électronique appliquée et des systèmes embarqués à l’INSA de Rouen. 9e colloque francophone de Robotique Pédagogique. La Ferté-Bernard, France. HUEBER E., URBAN J. (2009) Qu’attendre des LEGO « MindStorms » dans nos domaines d’enseignement ? Technologies &Formations. 2009, Vol. 146, p. 9-12. LAUZIER I., NONNON P., CARON M. (2007) Une expérience d'approche par projets pour favoriser l'intégration des apprentissages. 9ème Colloque Francophone de Robotique Pédagogique. La Ferté-Bernard. LEROUX P. (1996) Intégration du pilotage de micro-robots pédagogiques à un environnement de programmation. Actes de la Cinquième Rencontre Francophone sur la Didactique de l’Informatique. Monastir, Tunisie : EPI, 1996. p. 183-194. LEROUX P. (2005) 20 ans de Robotique Pédagogique à l’Université du Maine. 8e colloque francophone de Robotique Pédagogique. La Ferté-Bernard, France. LEVY S., MIODUSER T. (2010) Approaching Complexity through Planful Play: Kindergarten Children's Strategies in Constructing an Autonomous Robot's Behavior. International Journal of Computers for Mathematical Learning. Avril 2010, Vol. 15, n°1, p. 21-43. MARTIN K. (1996) Critical incidents in teaching and learning. Issues of Teaching and Learning. 1996, Vol. 2, n°8. MATARIC M. (1998) CS445 : Introduction to robotics, a lego-kit-based hands-on lab course. http://wwwscf.usc.edu/˜csci445, 1998 MAYER R. E. (2004) Should there be a three-strikes rule against pure discovery learning ». American Psychologist. 2004, Vol. 59, n°1, p. 14–19. MCNERNEY T. S. (2004) From turtles to Tangible Programming Bricks: explorations in physical language design. Personal and Ubiquitous Computing. 2004, Vol. 8, n°5, p. 326–337. MEURICE DE DORMALE R. (1997) Robotique virtuelle : Environnement pour un apprentissage dynamique et interactif de l'algorithmique. CeFIS. Namur. NONNON P. (1989) Conférence de clôture. Bilan et perspectives ». Actes du premier congrès francophone de robotique pédagogique, Le Mans. NONNON P. (2002) Considérations sur la recherche de développement en éducation : le cas de l’ExAO. ». Communication présentée au Symposium international sur les technologies informatiques en Éducation : perspectives de recherche problématiques et questions vives, 2002. PAPERT S. (1981) Computer-Based Microworlds as Incubators for Powerful Ideas. The Computer in the School: Tutor, tool, tutee. New York : R. Taylor, 1981. p. 203-210. PARCHEMAL Y., BARON, G-L. (2010) Plenadis: a collaborative work platform for higher education. In Proceedings of Edulearn 2010. PARMENTIER C. (1992) L'utilisation de robots éducatifs pour la formation à la conduite de machines automatisées. Formation et apprentissage des adultes peu qualifiés, 1992. p. 185-189. PARSONS S., SKLAR E. (2004) Teaching AI using LEGO Mindstorms. AAAI Spring Symposium. PIAGET J. (1970) Pour une théorie de la connaissance. Gonthier. (Psychologie et épistémologie). Paris. RUSSELL S. J., NORVIG P. (2009) Artificial intelligence: a modern approach. Prentice hall. TARDIF J. (1997) Pour un enseignement stratégique: l'apport de la psychologie cognitive. [s.l.] : Les Ed. Logiques. VIAU R. (1997) La motivation en contexte scolaire. (2e éd.). Bruxelles: De Boeck. p. 127. VIVET M. (1989) Robotique pédagogique, soit... mais pour enseigner quoi ? Actes du 1er congrès francophone de robotique pédagogique. p. 7-16. VIVET M., LEROUX P., DELANNOY P. (1997) ROBOTEACH: un assistant pédagogique logiciel dédié à l'alphabétisation en technologie ». Montréal, 1997. p. 45– 58. VYGOTSKI L. (1978) Mind in Society. Harvard University Press. Cambridge.
| ||||
Référence de l'article :David JANISZEK, Damien PELLIER, Julie MAUCLAIR, Laetitia BOULC'H, Georges-Louis BARON, Yannick PARCHEMAL, Utilisation de la robotique pédagogique pour enseigner l'intelligence artificielle : une expérience d'approche par projet auprès d’étudiants en informatique, Rubrique de la Revue STICEF, Volume 18, 2011, ISSN : 1764-7223, mis en ligne le 31/01/2012, http://sticef.org |


© Revue Sciences et Techniques de l'Information et de la Communication pour l'Éducation et la Formation, 2011