de l´Information et
de la Communication pour
l´Éducation et la Formation
version à télécharger (pdf)
Volume 14, 2007
Article de recherche
|
Contact : infos@sticef.org |
Analyse et représentation en deux dimensions de traces pour le suivi de l'apprenant
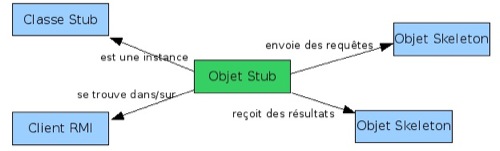
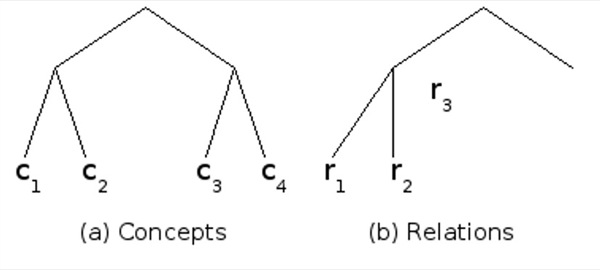
1. IntroductionLorsqu'un enseignant encadre des travaux pratiques, son objectif est d'évaluer les apprenants pour détecter au plus tôt ceux qui rencontrent des problèmes. Les moyens mis à sa disposition varient suivant le domaine d'application. Par exemple en laboratoire de langue, l'enseignant dispose d'un pupitre lui permettant de choisir l'étudiant qu'il va écouter. En informatique, l'enseignant passe d'apprenant en apprenant et observe leur production sur l'écran. Pour optimiser son temps, il pourra, s'il connaît déjà les apprenants et donc leur niveau, passer plus de temps avec ceux qui vont être a priori en difficulté. Le problème est que cet encadrement n'est plus réalisable lorsque le nombre d'apprenants augmente, ou lorsque l'enseignement est dispensé à distance. C'est à partir de ce constat que avons travaillé sur la création d'indicateurs permettant d'alerter l'enseignant si besoin est. Mais de quelles informations disposons-nous ? En fait, seules les actions de l'apprenant sont accessibles, c'est ce que l'on nomme les traces. Parallèlement, depuis maintenant quelques années nous utilisons un ensemble d'outils développés par F. Delorme (Delorme, 2005) permettant d'évaluer les apprenants. Nous leur demandons de construire des cartes conceptuelles. Ces cartes sont ensuite analysées et un des outils permet de les positionner sur un plan, et donc d'identifier celles qui sont proches ou éloignées des solutions. En s'inspirant de ces résultats nous avons eu l'idée de représenter dynamiquement les traces des apprenants sur un plan afin de former des chemins. Ceci permettra à l'enseignant de savoir rapidement si l'apprenant tend ou non vers la bonne solution. Après avoir rappelé les concepts importants de notre environnement d'évaluation, nous étudierons l'utilisation de traces explicites de l'apprenant afin de caractériser son avancement dans la résolution d'un problème. Puis nous proposerons une restitution synthétique de cette information à l'enseignant afin qu'il puisse se faire un avis sur l'apprenant. L'analyse automatique des traces ainsi que la restitution de l'information nous amèneront à des problèmes de classification, l'apprenant est-il ou non dans la bonne direction ? Puis nous présenterons des algorithmes de réduction de dimensions (SNE, cartes de Kohonen) qui permettront de projeter des informations sur un plan afin de visualiser « l'état » de l'apprenant. Nous présenterons l'originalité de notre approche qui utilise un algorithme de projection basé sur l'utilisation conjointe du SNE et des cartes de Kohonen dont la phase d'apprentissage a été adaptée à notre problématique. Puis nous proposerons une amélioration basée sur une dissimilarité ensembliste pondérée par une mesure de similarité entre les éléments de ces ensembles. Nous conclurons alors sur une validation expérimentale de nos travaux où nous montrerons que nous arrivons à caractériser les apprenants effectuant des exercices. Mais nous commencerons par présenter le contexte dans lequel nous travaillons, c'est-à-dire notre environnement d'évaluation et l'ensemble des outils qui le composent. 2. ContexteLe contexte de ce travail s'inscrit dans les travaux de thèse de Fabien Delorme (Delorme, 2005) sur l'évaluation des apprenants concernant les deux premiers niveaux de connaissances de la taxonomie de Bloom (Bloom, 1956) : les niveaux « connaissance » et « compréhension ». F. Delorme a constaté qu'il n'existe pas de logiciel d'évaluation qui minimise les trois contraintes suivantes : - donner assez de liberté à l'apprenant pour qu'il puisse exprimer ce qu'il sait, - minimiser le travail en amont de l'évaluation, c'est-à-dire ne pas fournir trop de connaissance au système pour effectuer l'évaluation, - minimiser le travail de l'enseignant en aval de l'évaluation, c'est-à-dire obtenir une évaluation (semi-)automatique. Par exemple les QCM, qui permettent d'obtenir une correction automatique, minimisent bien le troisième critère, mais laissent peu d'initiative à l'apprenant et demandent à l'enseignant un travail important de préparation comme l'indique J-M. Labat (Labat, 2002). En s'inspirant des travaux en science de l'éducation de Britt-Mari Barth (Bart, 1993), F. Delorme a proposé une méthode et des outils pour l'évaluation des apprenants en utilisant les cartes conceptuelles. L'objectif est de demander à l'apprenant d'expliciter des notions (concepts à définir) en les reliant à d'autres concepts. Le couple relation/concept cible pour une notion est nommé « attribut ». Par exemple, la carte de la figure 1 décrit la notion « Objet Stub » en lui associant les quatre attributs : - « est une instance », « classe Stub », - « se trouve dans/sur », « client RMI », - « envoie des requêtes », « objet skeleton », - « reçoit des résultats », « objet skeleton ».
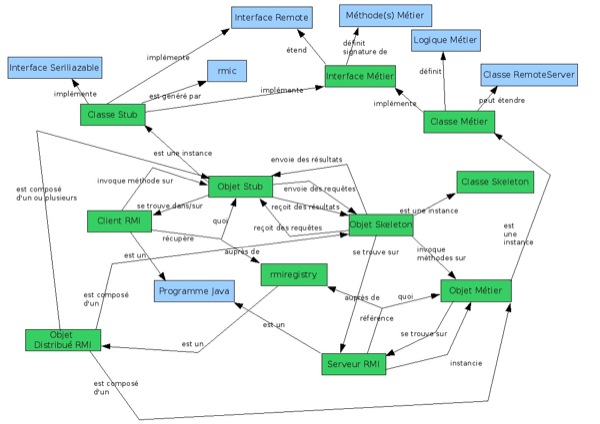
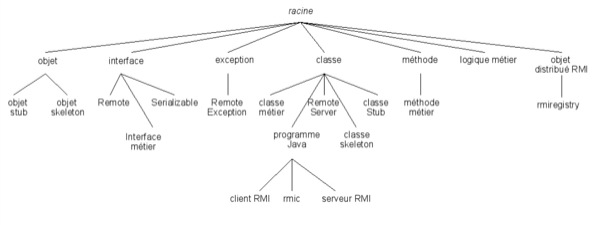
Figure 1 • Une carte conceptuelle définissant la notion Objet Stub Ce type de carte permet d'évaluer le premier niveau de la taxonomie de Bloom, le niveau connaissance. Mais lorsque l'on demande aux apprenants de définir plusieurs notions d'un cours, un concept cible pour une notion donnée peut aussi être une notion à définir. Dès lors l'apprenant est obligé d'exprimer les relations qu'il y a entre les notions d'un cours, d'où une évaluation du niveau compréhension. Par exemple, la figure 2 présente les notions du cours sur la technologie Java RMI : en vert les notions du cours (« Class Stub », « Client RMI », « Objet distribué RMI », etc.) et en bleu les concepts (« Interface serializable », « Interface Remote », etc.). F. Delorme (Delorme, 2005) a montré que la correction manuelle de cartes conceptuelles donnait des résultats équivalents à la correction des définitions des mêmes notions en langue naturelle. Il a de plus montré que des algorithmes de classification (k-ppv, (Cover et Hart, 1967) et carte de Kohonen, (Kohonen, 2001)) pouvaient donner des résultats proches d'une classification manuelle. En contrepartie, l'utilisation de ces algorithmes oblige l'enseignant à lister l'ensemble des concepts et des relations utilisables pour définir une notion. De plus ces concepts et ces relations doivent être organisés hiérarchiquement (par l'enseignant) suivant la relation « est un » à l'image des supports dans les graphes conceptuels (Genest, 2002). La figure 3 propose une partie du support qui a permis de créer la carte précédente.
Figure 2 • Union de cartes conceptuelles présentant les notions liées à RMI
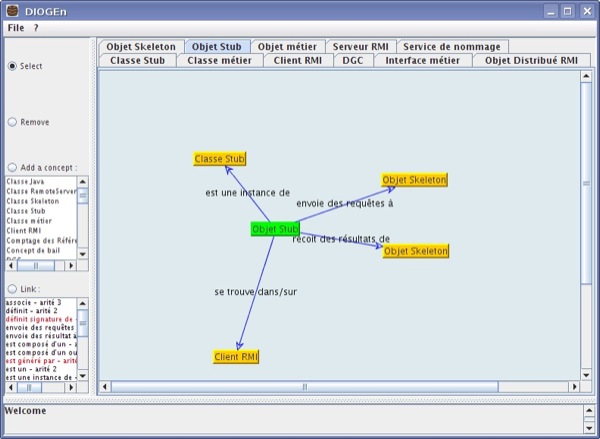
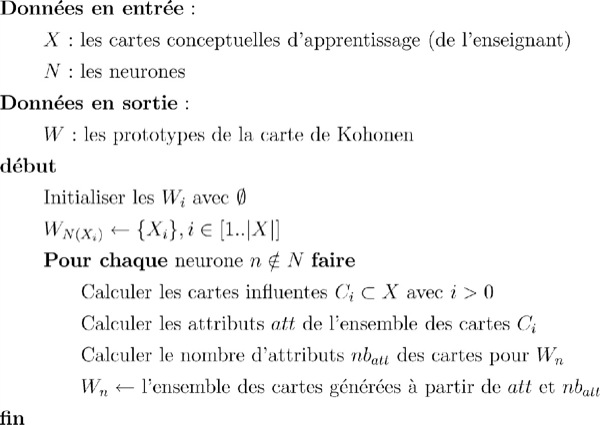
Figure 3 • Hiérarchie des concepts pour définir les notions du cours RMI Pour valider l'hypothèse que la production de cartes conceptuelles par l'étudiant est évaluable automatiquement, F. Delorme a développé plusieurs logiciels : - Diogen, l'éditeur de cartes conceptuelles (Cf. figure 4), - Monime, l'évaluateur de cartes conceptuelles utilisant l'algorithme des k-ppv, - Anthystène, le logiciel permettant de classer des cartes et obtenir un rendu graphique de cette classification. Il utilise l'algorithme des cartes de Kohonen que nous allons détailler par la suite.
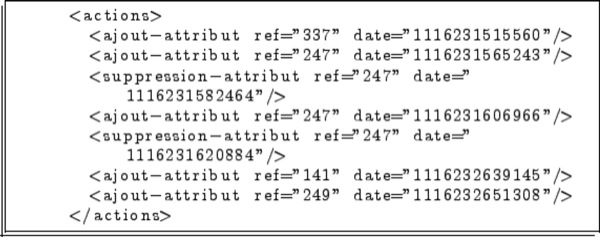
Figure 4 • Interface utilisateur du logiciel Diogen Cette méthode et ces outils ont été utilisés à plusieurs occasions dans le cadre de deux cours d'informatique : un cours d'algorithmique sur les tris et un cours d'informatique répartie sur la technologie Java RMI (JDK 1.3). C'est lors d'une de ces dernières expérimentations que nous avons enregistré les actions des apprenants qui ont servi de données au travail présenté dans cet article. 3. Les traces pour le suivi de l'apprenantComme nous venons de le voir, notre environnement d'évaluation propose différents outils pour situer l'apprenant en termes de résultat. L'enseignant, qui utilise ces outils n'est pas dans la même situation qu'une correction de copie. Il ne voit que le résultat final et aucunement la méthode avec laquelle l'apprenant a atteint son but ou pas. Nous souhaitons donc proposer à l'enseignant un outil permettant de suivre un à un les apprenants afin de voir comment ils avancent et si possible les guider vers « la solution ». 3.1. La dynamique du couple apprenant/enseignantNous avons d'une part l'apprenant qui utilise Diogen pour résoudre un exercice (c.-à-d. construire des cartes conceptuelles). Il effectue donc des actions explicites telles que des ajouts/retraits de concepts, de relations, ... mais aussi des actions implicites (comme les mouvements de souris ou encore son comportement devant la machine). D'autre part, nous avons l'enseignant qui souhaite cibler un apprenant pour voir comment il travaille. Dans le cas d'un cours en présentiel (ou par « vidéo interposée ») l'enseignant pourrait utiliser son expérience et détecter en partie les comportements d'apprenants en difficulté. Dans le cas d'un suivi à distance les seuls retours possibles pour l'enseignant seront les actions « informatiques » de l'apprenant et l'état d'avancement de l'exercice. L'enseignant à distance ne peut pas se permettre d'analyser en parallèle tous les apprenants effectuant l'exercice. C'est pourquoi nous devons lui fournir un outil analysant automatiquement les actions des apprenants et l'état des exercices pour l'aiguiller vers les apprenants en difficulté. Nous devons tout d'abord choisir les actions à analyser. Les actions explicites sont très intéressantes puisqu'elles influent directement sur l'état de l'exercice. En ce qui concerne les actions implicites, comme le comportement de l'apprenant, il est plus difficile de les modéliser et de les analyser sans faire appel aux sciences du comportement. De la même façon les mouvements de souris dépendent énormément du sujet (rapidité, dextérité, ...) et font plus appel à une étude du sujet humain que nous ne sommes pas pour l'instant en mesure d'effectuer. Dans le cadre de nos travaux nous nous sommes penchés sur les données les plus objectives et les plus « facilement récupérables », c'est-à-dire les actions explicites (ajout/retrait de concepts/relations). Il est alors possible, à partir de ces informations, de reconstituer tout le cheminement daté de l'apprenant par rapport à sa situation actuelle de résolution de l'exercice. Grâce à ces traces, l'enseignant pourrait être en mesure d'évaluer la démarche de l'apprenant, savoir où il se situe et si il est en difficulté ou non. Le problème est que ces traces brutes demandent un temps d'analyse humain trop important pour porter l'attention sur toute une classe. 3.2. Analyse et restitution de l'informationL'analyse automatique des traces est donc indispensable pour aider l'enseignant dans son ciblage des apprenants. Non seulement l'enseignant doit rapidement voir quel apprenant est en difficulté, mais aussi où se situe la difficulté. L'analyse faite par la machine doit être restituée de manière synthétique afin de permettre une lecture rapide. Une des façons les plus simples pour synthétiser l'information serait d'utiliser la métaphore du feu tricolore pour chaque apprenant. Le feu rouge, l'apprenant est en grande difficulté, le feu vert l'apprenant n'a pas de problème et enfin le feu orange l'apprenant s'égare. Cette métaphore est séduisante de prime abord puisque l'enseignant saurait rapidement détecter les apprenants problématiques. C'est d'ailleurs ce que proposent R. Mazza et V. Dimitrova dans (Mazza et Dimitrova, 2007) en associant une couleur aux couples (exercice, étudiant). L'enseignant dispose d'une vue synthétique contenant l'ensemble des étudiants et des exercices ainsi que le niveau de réussite indiqué par une couleur. L'objectif de nos travaux vise a caractériser de manière plus précise la progression de l’apprenant lors de la résolution d’un exercice. Nous allons pour cela introduire une notion de similarité (distance) entre ce que propose l'apprenant et des solutions.
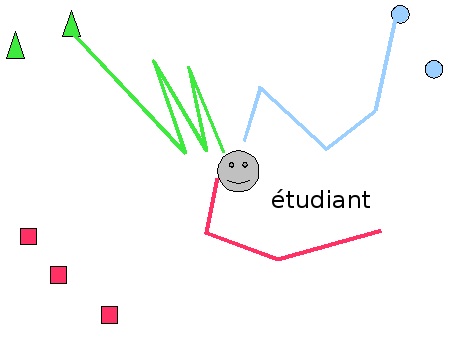
Figure 5 • Proposition de représentation de traces Dans la figure 5, nous proposons une représentation de l'analyse automatique des traces susceptible d'être exploitable par un enseignant. La figure représente sur un plan trois exercices (triangle, rond, carré) ayant chacun plusieurs solutions (2 pour triangle et rond, 3 pour carré). L'apprenant est placé au centre de la carte. Les tracés représentent la distance à laquelle l'apprenant se trouve des solutions. Le tracé bleu (qui mène aux ronds) montre que l'apprenant trouve assez rapidement la solution. Le tracé vert (qui mène aux triangles) montre que l'apprenant atteint une solution mais a fait preuve d'hésitations (allers-retours). Enfin le tracé rouge montre que l'apprenant s'éloigne de la solution. La représentation en deux dimensions que nous proposons ici, nous confronte à deux problèmes. D'une part, comment modéliser les traces afin d'y associer la notion de distance. D'autre part comment projeter ces informations dans un espace à deux dimensions. 4. Comment projeter des informations sur un plan ?4.1. Algorithmes de projection de données de
|

ac1,r1 |
ac1,r2 |
ac1,r3 |
ac2,r1 |
ac2,r2 |
ac2,r3 |
ac3,r1 |
ac3,r2 |
ac3,r3 |
ac4,r1 |
ac4,r2 |
ac4,r3 |
|
ac1,r1 |
0 |
0,33 |
0,5 |
0,25 |
0,58 |
0,75 |
0,5 |
0,83 |
1 |
0,5 |
0,83 |
1 |
ac1,r2 |
0,33 |
0 |
0,33 |
0,58 |
0,25 |
0,58 |
0,83 |
0,5 |
0,83 |
0,83 |
0,5 |
0,83 |
ac1,r3 |
0,5 |
0,33 |
0 |
0,75 |
0,58 |
0,25 |
1 |
0,83 |
0,5 |
1 |
0,83 |
0,5 |
ac2,r1 |
0,25 |
0,58 |
0,75 |
0 |
0,33 |
0,5 |
0,5 |
0,83 |
1 |
0,5 |
0,83 |
1 |
ac2,r2 |
0,58 |
0,25 |
0,58 |
0,33 |
0 |
0,33 |
0,83 |
0,5 |
0,83 |
0,83 |
0,5 |
0,83 |
ac2,r3 |
0,75 |
0,58 |
0,25 |
0,5 |
0,33 |
0 |
1 |
0,83 |
0,5 |
1 |
0,83 |
0,5 |
ac3,r1 |
0,5 |
0,83 |
1 |
0,5 |
0,83 |
1 |
0 |
0,33 |
0,5 |
0,25 |
0,58 |
0,75 |
ac3,r2 |
0,83 |
0,5 |
0,83 |
0,83 |
0,5 |
0,83 |
0,33 |
0 |
0,33 |
0,58 |
0,25 |
0,58 |
ac3,r3 |
1 |
0,83 |
0,5 |
1 |
0,83 |
0,5 |
0,5 |
0,33 |
0 |
0,75 |
0,58 |
0,25 |
ac4,r1 |
0,5 |
0,83 |
1 |
0,5 |
0,83 |
1 |
0,25 |
0,58 |
0,75 |
0 |
0,33 |
0,5 |
ac4,r2 |
0,83 |
0,5 |
0,83 |
0,83 |
0,5 |
0,83 |
0,58 |
0,25 |
0,58 |
0,33 |
0 |
0,33 |
ac4,r3 |
1 |
0,83 |
0,5 |
1 |
0,83 |
0,5 |
0,75 |
0,58 |
0,25 |
0,5 |
0,33 |
0 |
Tableau 1 • Exemple de calcul de distance entre attributs
6.2. Nouveau calcul de dissimilarité entre cartes conceptuelles
Maintenant que nous avons la possibilité de calculer une distance entre deux attributs, distance qui est comprise entre 0 et 1, nous pouvons modifier le calcul de dissimilarité entre deux cartes conceptuelles. Nous parlons maintenant de dissimilarité car nous n'avons pas vérifié que notre proposition valide l'inégalité triangulaire (condition indispensable dans le cadre d'une distance).
Il faudrait lorsque deux attributs sont éloignés sémantiquement que l'on retrouve la formule précédente. Or lorsque deux attributs sont éloignés, leur distance a pour valeur 1. Dans la formule précédente ces deux attributs apparaissent dans le numérateur car ce sont des éléments de la différence symétrique, ils augmentent donc la valeur de cette cardinalité de 2. Cette réflexion induit l'algorithme présenté à la figure 17 pour calculer le nouveau numérateur.
Le principe est, lorsqu'aucune des deux cartes n'est vide, de sélectionner deux attributs a et b (avec a appartenant à la première carte et b à la seconde) qui sont les plus proches (qui minimisent donc leur distance). Dans ce cas le numérateur de la distance entre les deux cartes est égal à deux fois la distance de a à b en additionnant le résultat de l'application de ce même algorithme avec les deux cartes ne possédant plus a et b.
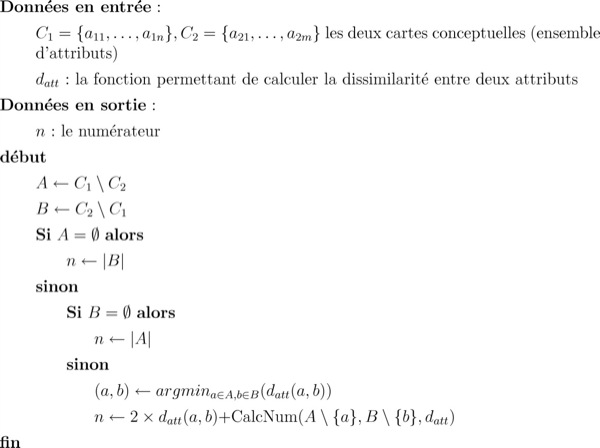
Figure 17 • Calcul du numérateur de la distance entre deux cartes (CalcNum)
Finalement nous avons :
Pour bien comprendre ce calcul, reprenons l'exemple précédent en supposant que l'on désire calculer la distance entre deux cartes C1 et C2 telles que :
- C1 est composée des attributs ac1,r1 , ac2,r1 et ac3,r3;
- C2 est composée des attributs ac2,r2 et ac4,r1.
Les distances entre ces attributs présentées par le tableau 2 sont extraites du tableau 1. Ainsi, pour calculer la distance entre C1 et C2, on commence par rechercher la plus petite distance entre deux attributs, en l'occurrence celle entre ac2,r1 et ac2,r2, soit 0,33. Une fois ces deux attributs retirés, c'est la distance entre ac1,r1 et ac4,r1 qui est la plus petite, soit 0,5 Il ne reste alors plus que l'attribut ac3,r3 de la carte C1 qui n'a pas été utilisé. Dès lors, on a :

alors qu'avec la distance précédente nous aurions obtenue la valeur 1.
ac1,r1 |
ac2,r1 |
ac3,r3 |
|
ac2,r2 |
0,58 |
0,33 |
0,83 |
ac4,r1 |
0,5 |
0,5 |
0,75 |
Tableau 2 • Distance entre attributs des cartes C1 et C2
6.3. Validation
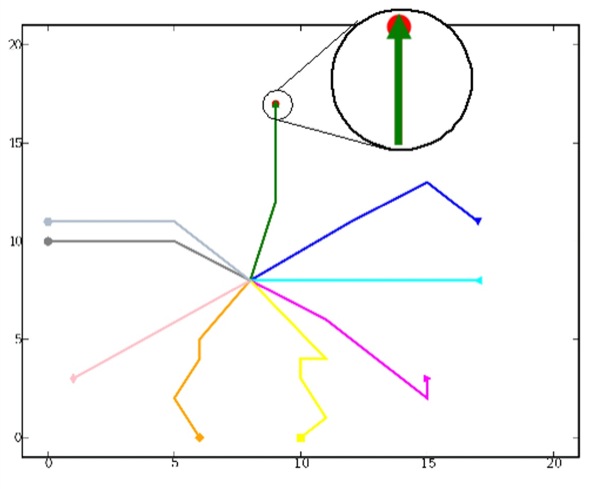
Avant de valider cette nouvelle proposition avec les productions des apprenants, reprenons la production de l'enseignant (Cf. figure 18). Nous pouvons constater que le résultat est celui attendu. En effet, la progression des chemins de l'enseignant le mène bien aux solutions qu'il a lui-même définies. De plus, les solutions et les chemins sont discriminés contrairement à nos précédents tests.
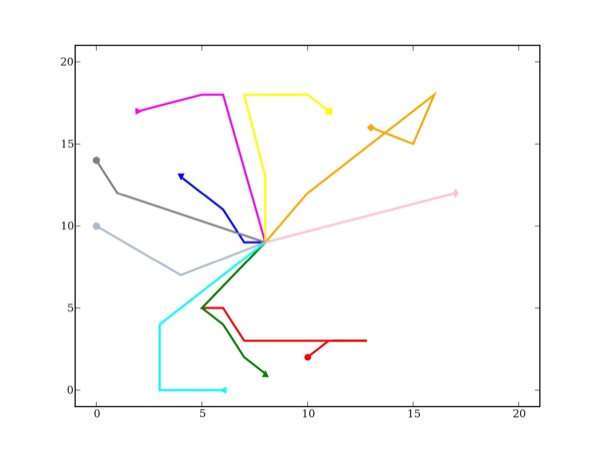
Figure 18 • Nouvelle projection des traces réelles de l'enseignant avec calcul de similarité entre attributs
Nous avons aussi validé cette nouvelle approche avec les données récupérées lors de l'expérimentation de Mai 2005, soit avec les traces de 22 apprenants.
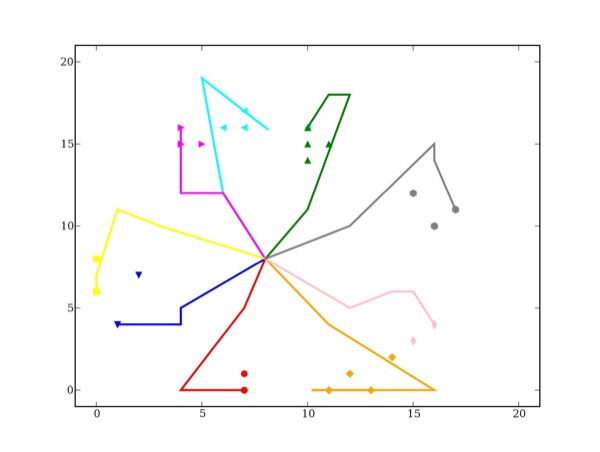
Le diagramme de la figure 19 est la nouvelle projection de l'apprenant précédent. Bien qu'un peu plus confus au premier abord, les chemins sont mieux séparés les uns des autres. On peut noter qu'il a mal défini les notions représentées par les couleurs gris foncé (hexagone) et magenta (triangle pointe à droite) : soit les deux notions qui avaient été notées fausses lors de la correction manuelle. Sinon, à part quelques hésitations (chemins gris clair et vert), on voit que les autres chemins tendent vers la bonne direction.
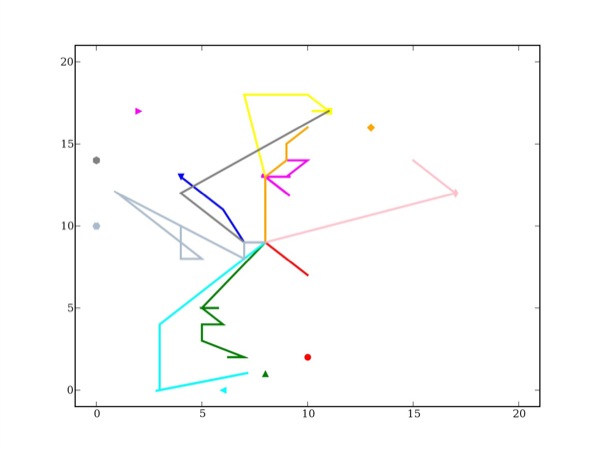
Figure 19 • Nouvelle projection des traces réelles d'un « bon » apprenant avec calcul de similarité entre attributs
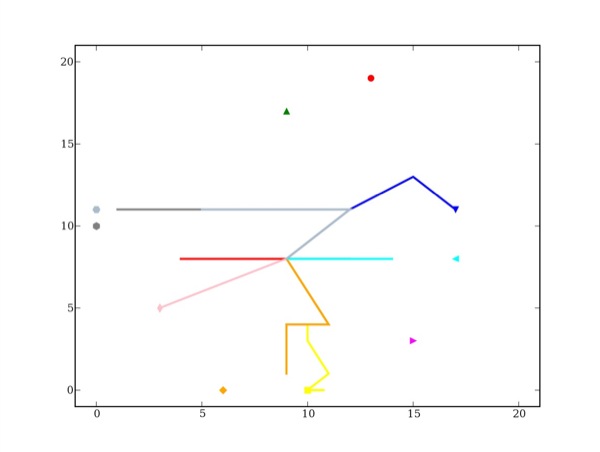
Le diagramme de la figure 20 quant à lui présente la projection d'un apprenant en grande difficulté. Les chemins sont chaotiques, changent régulièrement de direction (chemins vert, magenta et rose) et certains ne vont pas dans la bonne direction (chemins rouge et bleu). En observant la construction de ces chemins, l'enseignant devrait rapidement se rendre compte qu'il y a un problème avec cet apprenant et donc pouvoir intervenir au plus tôt.
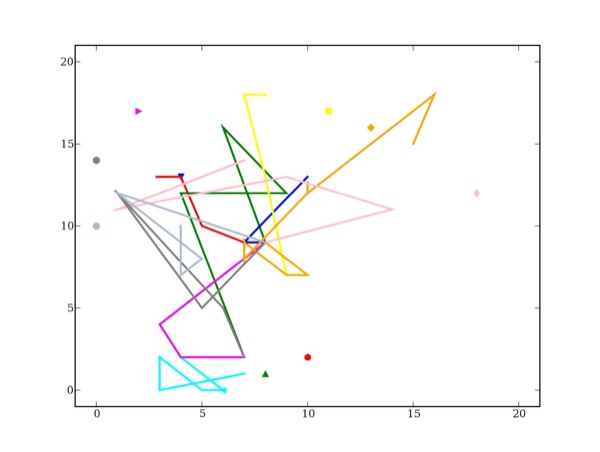
Figure 20 • Projection des traces réelles d'un apprenant en difficulté avec calcul de similarité entre attributs
7. Conclusions et perspectives
Nous avons dans cet article décrit une nouvelle interface, ainsi qu'une nouvelle méthode pour évaluer la progression d'un étudiant résolvant un exercice. Contrairement à un outil comme CourseVis (Mazza et Dimitrova, 2007), qui utilise uniquement une signalétique de couleur donnant uniquement l'état de la production de l’apprenant à un instant t, nous avons développé un outil permettant de caractériser le résultat aussi bien en terme d'avancement qu'en terme d'exactitude. Pour cela nous avons créé des algorithmes originaux, dont une nouvelle manière d'initialiser les cartes de Kohonen lorsque les données sont symboliques. De plus, nous avons validé la cohérence des résultats sur des données réelles d'une promotion de 22 étudiants.
Toutefois cette validation, pour le moment, ne prend pas en compte la communauté enseignante dans la pratique de l'outil. Nous sommes conscients qu'un des problèmes de notre approche est le suivi d'un nombre important d'apprenants. Il faudrait au préalable fournir à l'enseignant une vue globale et synthétique de l'avancement des apprenants pour l'aider à choisir les traces de l'apprenant qu'il veut visualiser.
C'est ce que propose CourseVis via une matrice de couleurs pour présenter cette vue synthétique. Nous pourrions alors connecter notre outil pour obtenir le fonctionnement de la figure 21. Mais une fois de plus avec CourseVis, nous retombons sur une observation globale des étudiants sans même connaître leur dynamique. L'étudiant passe-t-il du vert au rouge parce qu'il est lent, parce qu'il se trompe et comment se trompe-t-il ? Il n'y a pas de dynamique de comportement dans l'outil.
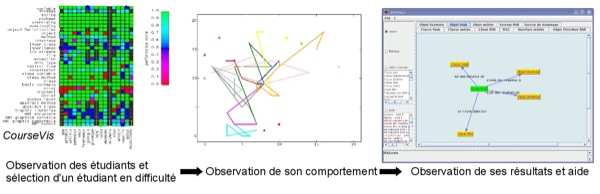
Figure 21 • Les 3 étapes de détection et de suivi d'un apprenant
Une de nos principales perspectives est de généraliser notre outil à l'observation d'une classe. L'idée n'est plus de calculer des distances entre la carte de l'étudiant et la carte solution pour chaque exercice d'un devoir. Nous considérerons le devoir comme un ensemble de cartes d'exercices et nous calculerons les distances entre l'ensemble des cartes de l'étudiant et l'ensemble des cartes solution du devoir.
Lorsque nous aurons cet outil de synthèse, une autre perspective sera la validation de ces travaux par une mise en oeuvre dans des conditions temps réel avec des enseignants. Nous savons déjà que les algorithmes que nous utilisons ne poseront pas de problème. En effet, l'algorithme le plus gourmand en temps est l'algorithme du SNE (à cause de l'algorithme de descente de gradient). Mais ce dernier n'est lancé qu'une seule fois pour initialiser la carte de Kohonen. Ensuite la projection d'une carte ne prend que quelques dixièmes de seconde.
D'une manière plus générale, notre méthode est applicable à toutes données modélisables par des ensembles et pour lesquelles on peut établir une similarité. De plus il est nécessaire d’avoir des exemples d’apprentissage (dans notre cas des cartes solutions des exercices). Par exemple, notre méthode est applicable sur les données présentées par Harp et al. (Harp et al, 1995). Celui-ci montre en effet comment transformer des données symboliques issues de QCM en ensembles organisés de connaissances.
Nous espérons grâce à ces algorithmes et à ces outils pouvoir améliorer le suivi en temps réel d'étudiants à distance.
Remerciements
Nous tenons ici à remercier Alain Rakotomamonjy et Gilles Gasso pour toute l'aide qu'ils nous ont apportée lors de l'étude des algorithmes de classification et des algorithmes de réduction de dimensions.
BIBLIOGRAPHIE
BART B.-M.. (1993). Le savoir en construction. Retz.
BESSON M. (1973) A propos des distances entre ensembles de parties. Mathématiques et Sciences Humaines, 42 p.17–35.
BlOOM B. S. (1956) Taxonomy of Educational Objectives, Handbook I : The Cognitive Domain. David McKay Co Inc.
COVER T., P. Hart. (1967) Nearest neighbor pattern classification. Information Theory, IEEE Transactions, vol. 13 p. 21–27.
CHIEN-SING L., YASHWANT P. S. (2004) Student modeling using principal component analysis of som clusters. In Proceedings of the IEEE International Conference on Advanced Learning Technologies, p. 480 – 484. IEEE Computer Society.
DELORME F., (2005) Évaluation et modélisation automatiques des connaissances des apprenants à l’aide de cartes conceptuelles. Thèse, INSA de Rouen.
DELORME F., LOOSLI G., (2006) Un outil générique pour l’analyse automatique et la visualisation de productions d’apprenants. In TICE 2006, Technologies de l’Information et de la Communication dans les Enseignements.
EL GOLLI A., ROSSI F., CONAN-GUEZ B., LECHEVALLIER Y., (2006) Une adaptation des cartes auto-organisatrices pour des données décrites par un tableau de dissimilarités. Revue de Statistique Appliquée, LIV(3) p. 33–64,.
GENEST D., (2002) Recherche d’information par transformation de graphes dans le modèle des graphes conceptuels. Ingénierie des systèmes d’information,7(1-2) p. 207–236.
HARP S. A., SAMAD T., VILLANO M., (1995) Modeling student knowledge with self-organizing feature maps. IEEE transactions on systems, man, and cybernetics, 25(5) p. 727–737.
HOTELLING H., (1933) Analysis of a complex of statistical variables with principal components. Journal of Educational Psychology.
HINTON G., ROWEIS S., (2003) Stochastic neighbor embedding. In S. Thrun S. Becker and K. Obermayer, editors, Advances in Neural Information Processing Systems vol 15, p. 833–840. MIT Press.
KOHONEN T., (2001) Self-Organizing Maps. Springer, Verlag.
LABAT J.-M. (2002) Eiah, quel retour d’informations pour le tuteur ? In Technologies de l’Information et de la Communication dans les Enseignements d’ingénieurs et dans l’industrie, p. 81–88.
LEBART L., MORINEAU A., FENELON J.-P., (1982) Traitement des données statistiques. Dunod Ed.
MAZZA R., DIMITROVA V., (2007) Coursevis : A graphical student monitoring tool for supporting instructors in web-based distance courses. International Journal in Human-Computer Studies, (65) p. 125–139.
PREUX P., (2007) Fouille de données, notes de cours. Disponible sur internet http://www.grappa.univ-lille3.fr/˜ppreux/, ( avril 2007).
ROWEIS S. T., Saul L. K., (2000) Nonlinear dimensionality reduction by locally linear embedding. Science, 290(5500) p. 2323 – 2326.
VAN DER MAATEN L., (2007) Dimensionality reduction : A comparative review. Disponible sur internet consulté en mai 2007) http://www.cs.unimaas.nl/l.vandermaaten/Laurens_van_der_Maaten/Matlab_Toolbox _for_Dimensionality_Reduction.html.
 A
propos des auteurs
A
propos des auteurs
Nicolas DELESTRE est Maître de Conférences
à l'INSA de Rouen. Il est membre du LITIS (Laboratoire d'Informatique, de
Traitement de l'Information et des Systèmes). Il enseigne
l'algorithmique, les réseaux et l'informatique répartie dans le
département ASI.
Il a soutenu sa thèse début 2000 en Informatique dans le
domaine des hypermédias adaptatifs dynamiques. Depuis cette thèse
il s'est spécialisé dans le domaine de l'évaluation des
apprenants à l'aide d'algorithmes d'apprentissage. Dans ce cadre, il a
co-encadré avec Jean-Pierre Pécuchet les travaux de thèse
de Fabien Delorme. Il est aussi membre du groupe de l'AFNOR qui travaille sur la
normalisationde métadonnées pour les ressources
pédagogiques.
Adresse : INSA de Rouen, Campus de Saint-Étienne du Rouvray, Avenue de l’Université - BP 8 76801 Saint-Étienne-du-Rouvray Cedex
Courriel : Nicolas.Delestre@insa-rouen.fr
Nicolas MALANDAIN est Maître de Conférences
à l'INSA de Rouen. Il est membre du LITIS (Laboratoire d'Informatique, de
Traitement de l'Information et des Systèmes). Il enseigne la
programmation JAVA, l'architecture des ordinateurs et les systèmes
d'exploitation, les technologies web et les interactions homme-machine.
Il a soutenu sa thèse en 2001 en Informatique dans le domaine de
l'extraction et l'interprétation d'informations géographiques dans
des documents ainsi que leur mise en relation avec des cartes.
Adresse : INSA de Rouen, Campus de Saint-Étienne du Rouvray, Avenue de l’Université - BP 8 76801 Saint-Étienne-du-Rouvray Cedex
Courriel : Nicolas.Malandain@insa-rouen.fr
Référence de l'article :
Nicolas DELESTRE, Nicolas MALANDAIN, Analyse et représentation en deux dimensions de traces pour le suivi de l'apprenant, Revue STICEF, Volume 14, 2007, ISSN : 1764-7223, mis en ligne le 12/03/2008, http://sticef.org
