de l´Information et
de la Communication pour
l´Éducation et la Formation
Volume 24, 2017
Article de recherche
Numéro Spécial
Sélection de la conférence
EIAH 2015

Analyse des comportements sociaux dans le cadre d’un apprentissage collectif de la programmation d’un robot de sol
![]() RÉSUMÉ : Cet
article a trait à l’apprentissage collectif mis en place dans le
cadre d’activités de programmation du robot de sol Bee-Bot
réalisées en contexte scolaire. Nous y proposons une
méthode d’analyse des comportements sociaux de jeunes enfants
amenés à collaborer au sein de groupes de travail de taille
restreinte. Cette méthode a été mise en œuvre dans le
cadre d’une observation participante dont l’objet était
d’analyser l’investissement personnel de chacun des vingt et un
sujets d’un échantillon d’élèves du primaire
âgés de cinq à six ans et de déterminer la
manière dont la collaboration intra-groupe s’opère à
l’occasion de situations de manipulations communes du jouet programmable.
Les résultats de la recherche ont permis de déterminer cinq types
de profils : les comportements de compétiteurs, de leaders, de
conciliants, de suiveurs et de désinvestis ainsi que de mettre en
évidence des dynamiques collectives en fonction de la combinaison des
profils.
RÉSUMÉ : Cet
article a trait à l’apprentissage collectif mis en place dans le
cadre d’activités de programmation du robot de sol Bee-Bot
réalisées en contexte scolaire. Nous y proposons une
méthode d’analyse des comportements sociaux de jeunes enfants
amenés à collaborer au sein de groupes de travail de taille
restreinte. Cette méthode a été mise en œuvre dans le
cadre d’une observation participante dont l’objet était
d’analyser l’investissement personnel de chacun des vingt et un
sujets d’un échantillon d’élèves du primaire
âgés de cinq à six ans et de déterminer la
manière dont la collaboration intra-groupe s’opère à
l’occasion de situations de manipulations communes du jouet programmable.
Les résultats de la recherche ont permis de déterminer cinq types
de profils : les comportements de compétiteurs, de leaders, de
conciliants, de suiveurs et de désinvestis ainsi que de mettre en
évidence des dynamiques collectives en fonction de la combinaison des
profils.
![]() MOTS CLÉS : Apprentissage
collectif, interactions sociales, profils de comportements sociaux, enseignement
fondamental, robotique éducative
MOTS CLÉS : Apprentissage
collectif, interactions sociales, profils de comportements sociaux, enseignement
fondamental, robotique éducative
![]() ABSTRACT : The
article focuses on collaborative learning in the frame of programming activities
of the Bee-Bot floor robot in school. We propose a method to analyse social
behaviour of young children when they collaborate in small groups. This method
took place in the frame of a participative observation whose goal was to analyse
personal investment of the twenty-one subjects of a sample of pupils in primary
school, aged five to six, during common manipulations of the programmable toy.
On the other hand, the focus is set on determination of the way the intra-group
collaboration operates. One of the outcomes of the research is the determination
of fives behaviour profiles: competitors, leaders, conciliators, followers, not
implicated ones and of collaborative dynamics based on combinations of profiles.
ABSTRACT : The
article focuses on collaborative learning in the frame of programming activities
of the Bee-Bot floor robot in school. We propose a method to analyse social
behaviour of young children when they collaborate in small groups. This method
took place in the frame of a participative observation whose goal was to analyse
personal investment of the twenty-one subjects of a sample of pupils in primary
school, aged five to six, during common manipulations of the programmable toy.
On the other hand, the focus is set on determination of the way the intra-group
collaboration operates. One of the outcomes of the research is the determination
of fives behaviour profiles: competitors, leaders, conciliators, followers, not
implicated ones and of collaborative dynamics based on combinations of profiles.
![]() MOTS CLÉS : Collaborative
learning, social interactions, social behaviour profiles, fundamentally school,
educative robotic
MOTS CLÉS : Collaborative
learning, social interactions, social behaviour profiles, fundamentally school,
educative robotic
1. Introduction
1.1. Apprentissage collectif
L’objet de la recherche que nous allons présenter ici concerne les interactions sociales entre apprenants dans le cadre de l’exploitation d’un outil technologique conçu pour l’apprentissage des jeunes enfants âgés de quatre à sept ans. Des activités collectives ont été conçues et mises en place de manière à favoriser les interactions entre apprenants au sein de groupes de travail de taille restreinte dans un contexte scolaire. La finalité de ces activités réside en un partage de connaissances et une construction commune de compétences. Dans cette perspective, la scénarisation pédagogique vise la mise en place de conditions propices à un apprentissage collectif défini comme « un mode de partage et de construction de connaissances se réalisant lors de l’interaction entre apprenants » (George, 2004, p. 2). Ce type d’apprentissage se fonde sur les approches socio-culturelle (Vygotsky, 1978), (Vygotsky, 2013) et socio-constructiviste (Doisy et Mugny, 1981), (Doisy et Mugny, 1997) de la psychologie du développement. Dans le cadre de ces approches, l’enseignant initie des activités collectives qui sont susceptibles de favoriser l’apprentissage. Par ailleurs, il intervient au cours des activités en tant que facilitateur et en tant que régulateur des interactions entre pairs. Pour viser un apprentissage collectif, certaines conditions sont à respecter lors du design des activités comme la mise en œuvre d’un apprentissage par l’action, la création d’une interdépendance entre apprenants et la mise en place d’activités qui doivent aboutir à une production commune (George, 2004).
1.2. Profils de comportements sociaux
Lorsque des élèves sont mis en situation d’apprentissage collectif au sein de groupes de taille restreinte, une organisation se met en place de manière spontanée. Les partenaires se positionnent les uns par rapport aux autres de sorte que chacun trouve sa place (Pléty, 1998). L’observation de ces comportements sociaux par l’enseignant lui fournit des indicateurs pour comprendre, réagir et intervenir de manière à réguler la collaboration au sein du groupe (George, 2004). L’analyse des échanges au sein d’un groupe permet de déterminer des profils de comportements caractéristiques chez les partenaires. Ainsi sur la base d’une combinaison d’observations de différentes natures, Pléty fait ressortir des profils de comportements sociaux qui fondent des dynamiques d’appartenance, de cohésion et de leadership (Pléty, 1998). Fournir aux partenaires d’un apprentissage collectif des informations sur leurs propres profils permet de leur faire prendre conscience de la dynamique comportementale du groupe ce qui est de nature à leur permettre d’autoréguler leur processus de travail en commun (Jermann, 2004), (George, 2004), (Temperman, 2013).
1.3. Robotique pédagogique
Ces dernières années, la robotique pédagogique dont Papert a été l’initiateur au début des années quatre-vingts (Papert,1981) s’est tournée vers un public de plus en plus jeune, grâce notamment à la conception de nouveaux outils qui comportent un aspect ludique. C’est le cas des jouets programmables qui mémorisent une suite de commandes qu’ils exécutent ensuite de manière séquentielle. Les interfaces tangibles de ces jouets favorisent un usage précoce des concepts propres à la robotique chez les enfants les plus jeunes (Komis et Misirli, 2013). Ces jouets constituent des dispositifs technologiques tangibles que les enfants peuvent directement manipuler et qui peuvent stimuler la résolution de problèmes (Pekárová, 2008), (Greff, 2001). Ce sont de véritables outils de médiation, qui permettent aux enfants de s’y identifier par un effet miroir (Depover et al., 2007).
La robotique pédagogique est en adéquation avec le modèle constructiviste de l’apprentissage. Elle constitue un outil qui offre la possibilité de développer des compétences cognitives de haut niveau (Depover et al., 2007). Elle permet également à l’enfant d’explorer l’espace par l’intermédiaire de la technologie ou de simuler une expérimentation (Leroux et al., 2005). Pour Papert (Papert, 1981) et Greff (Greff, 1998), dès le plus jeune âge, l’enfant doit être initié à la pensée algorithmique. Le fait de concevoir un algorithme, de développer un programme et de le tester lui permet d’entrer en contact avec l’ordinateur. L’apprenant communique avec la machine dans un langage intelligible. Dans ce paradigme, les enfants sont les « bâtisseurs de leur savoir », de leurs propres structures intellectuelles et ils sont épistémologues c’est-à-dire qu’ils ont la capacité d’effectuer une étude critique de leur propre réflexion. Ainsi, la programmation d’un robot oblige l’apprenant à réfléchir à ses propres actions. Il doit se mettre à la place du robot. Il doit réfléchir à sa propre manière de se déplacer afin de le programmer correctement (Blanchet, 1991). Dans cette perspective, le robot peut être utilisé à l’école comme un outil permettant d’agir de manière efficace sur le développement cognitif des enfants. Il constitue également « un objet technologique dont il ne faudrait pas négliger la portée pédagogique en tant qu’artefact d’appropriation de connaissances techniques » (Komis et Misirli, 2012, p. 2).
2. Apprentissage collectif avec jouet programmable
2.1. Le robot de sol Bee-Bot
Le Bee-Bot, illustré à la figure 1, est un robot de sol (ou robot de plancher) programmable en forme d’abeille qui convient pour les enfants dès la maternelle jusque dans les premières années de l’école primaire (Beraza et al., 2010), (De Michele et al., 2008), (Komis et Misirli, 2012). Le contrôle des actions se réalise à partir d’une interface tangible qui se situe sur le dos du jouet. Cette interface est constituée de sept boutons qui permettent à l’utilisateur de programmer directement une succession d’instructions simples que le jouet va exécuter de manière séquentielle. Une rétroaction sonore est déclenchée à chaque fois qu’une commande est enregistrée par pression d’un de ces boutons. La mémoire de ce jouet programmable accepte jusqu’à quarante instructions consécutives.

Figure 1 • Bee-Bot avec son interface de manipulation
Quatre boutons de cimages/24.1.8.strebelle01.jpgouleur orange représentent des flèches. Deux d’entre eux ont pour fonction de gérer les déplacements avec les instructions « avance d’un pas » et « recule d’un pas », le Bee-Bot étant capable de se déplacer sur une surface plane à intervalle constant de 15 cm qui correspond à sa longueur. Les deux autres boutons orange permettent de gérer les rotations avec les instructions « tourne à gauche » et « tourne à droite », le robot pouvant effectuer une rotation sur place de 90°.
Un bouton central de couleur verte sur lequel est inscrit « GO » permet de demander au robot de sol d’exécuter la série des instructions qui ont été automatiquement enregistrées après chaque pression d’un bouton orange. Une fois le parcours entamé, le Bee-Bot marque une courte pause entre chaque opération. A la fin du parcours, ses yeux clignotent et un son est émis pour informer l’utilisateur du fait que la séquence d’instructions est terminée. Le bouton « GO » permet également d’arrêter la progression du jouet avant que la séquence d’instructions ne soit finie.
Deux autres boutons sont de couleur bleue : l’un lance l’instruction « nettoie » qui sert à effacer toutes les instructions qui ont été enregistrées au préalable ; l’autre correspond à l’instruction « pause » qui offre la possibilité de marquer un temps d’arrêt en interrompant de manière momentanée l’exécution des commandes.
Plusieurs accessoires sont disponibles pour diverses activités, notamment des tapis de sol représentant une ville, une île au trésor (cf. la figure 4) ou une ferme ainsi que des tapis conçus pour l’apprentissage des lettres et des chiffres.
2.2. Programmation collaborative
La réflexion critique que nécessite l’apprentissage de la programmation d’un robot de sol par de jeunes enfants peut être activée dans le cadre d’activités collaboratives centrées sur la confrontation de solutions alternatives entre pairs (Denis et Baron, 1993), (Leroux et al., 2005). L’apprentissage collectif est en effet particulièrement adapté à des problèmes qui exigent de nouvelles approches conceptuelles (Baudrit, 2007). Dans ce cadre, les apprenants se trouvent confrontés à des situations pour lesquelles ils ne sont pas en mesure de mobiliser une solution immédiate car leurs connaissances individuelles sont insuffisantes. Essayer, échanger, communiquer leurs propositions va les pousser à « avoir une conscience plus aiguë d’idées qui, à l’origine, relèvent seulement de l’intuition » (Baudrit, 2007, p. 68).
La collaboration entre élèves peut être un moyen approprié pour faciliter l’acquisition de certaines techniques de contrôle de la pensée (Gurtner et al., 1991), (Palincsar et Brown, 1984), (Perret-Clermont, 2000). Selon la thèse vygotskienne, ces aptitudes sont d’abord apprises en interaction avec d’autres sujets avant de pouvoir les appliquer seul (Baudrit, 2007). Ces auteurs mettent en avant le fait que la mise en œuvre et l’apprentissage de techniques de contrôle de la pensée seront plus faciles à opérer dans un premier temps sur un raisonnement conduit par un pair que sur son propre raisonnement. Dans ce dernier cas, il sera nécessaire de mener de front production et contrôle (Ducarme, 2014).
La collaboration a été peu étudiée au sein de la population à laquelle sont dédiés les jouets programmables du même type que le Bee-Bot. Pourtant certaines études (Gauvain et Rogoff, 1989) montrent que dès cinq ans, les enfants sont en mesure de collaborer efficacement à la recherche de solutions communes à une situation problème qui leur est soumise. C’est dans cette perspective que la recherche que nous nous proposons de décrire ci-après a été conçue. Elle vise à apporter des éléments de réponse à une question principale formulée comme suit : « Quelles interactions sociales sont mises en œuvre par des enfants de 5 à 6 ans pour réaliser en petits groupes de 3 à 4 sujets des activités de programmation collaborative du robot de sol Bee-Bot ? ». La recherche vise encore à répondre à la question complémentaire suivante : « La taille de l’équipe (3 ou 4 élèves) influence-t-elle la quantité et la qualité des interactions au cours d’activités de programmation collaborative du robot de sol Bee-Bot ? ».
3. Méthodologie de la recherche
3.1. Contexte de la recherche et échantillonnage
La recherche a été menée entre juin 2013 et avril 2014 en Belgique francophone au sein d’une école fondamentale fréquentée majoritairement par des enfants issus d’un milieu socio-économique relativement défavorisé.
Un échantillon de vingt et un élèves âgés de 5 à 6 ans a été constitué au début de la recherche. Ces enfants ont été extraits de deux classes au sein desquelles aucune activité avec un jouet programmable n’avait été organisée au préalable : la première classe comportait seize élèves et la seconde, quatorze. Suite au refus de leurs parents, neuf de ces trente enfants n’ont pas participé à la recherche.
Pour la réalisation des activités avec le jouet programmable, les élèves de l’échantillon ont été répartis en six groupes : trois équipes de trois sujets et trois équipes de quatre sujets. Ces six équipes ont été constituées au sein des deux classes en concertation avec les enseignants en associant des enfants de niveaux scolaires différents.
L’entièreté des activités a été filmée de manière à garder la trace des interactions au sein de chaque équipe. Les activités terminées, une analyse des comportements a été effectuée a posteriori. Au terme de la recherche, chacun des élèves de l’échantillon a été individuellement interrogé sur sa motivation générale par rapport à l’école et sur la manière dont il avait vécu les activités de groupe avec le robot de sol.
3.2. Scénario pédagogique
Le scénario pédagogique qui a été conçu dans le cadre de la recherche (Ducarme, 2014) s’appuie sur une séquence d’activités qui est structurée en quatre séances qui se déroulent sur un total de soixante-dix à cent minutes : une première séance de découverte et de familiarisation avec le jouet, une deuxième séance de déplacements pas-à-pas et deux séances de programmation d’un parcours. Chacune des équipes a réalisé ces séances séparément sous le contrôle d’une expérimentatrice qui joue un rôle de facilitatrice et de co-investigatrice (Komis et Misirli, 2012).
3.2.1. Séance 1 : Découverte du Bee-Bot (10 à 15 minutes)
La première séance est introductive. Elle se décline en deux phases. Dans un premier temps, un jouet Bee-Bot est présenté à l’équipe. L’expérimentatrice demande aux enfants de l’observer et de le décrire à tour de rôle. Dans un second temps, chaque enfant reçoit un robot qu’il peut manipuler à sa guise. Après quelques minutes, l’expérimentatrice organise une mise en commun orale des découvertes, centrée sur la fonction de chacun des sept boutons disposés sur le dos du jouet.
3.2.2. Séance 2 : Déplacements sur la représentation d’une route (20 à 30 minutes)
La deuxième séance se décline en trois phases successives. Dans un premier temps, la représentation d’un tronçon de route rectiligne est disposée au centre d’une table (cf. la figure 2). Un Bee-Bot est placé à une extrémité de la route et un bonbon à l’autre. Une remorque est attachée à l’arrière du jouet.
La consigne est de programmer le robot de sol en équipe pour qu’il se rende pas à pas au bout de la route. Lorsque le bonbon est atteint, un enfant peut déposer le bonbon dans la remorque. L’équipe doit alors programmer le robot pour qu’il effectue le parcours en sens inverse afin de retourner au point de départ au début de la route.
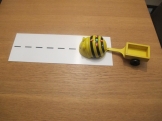
Figure 2 • Parcours rectiligne du Bee-Bot avec remorque
Dans un deuxième temps, un nouveau bonbon est placé au bout d’un deuxième tronçon de route qui est disposé dans le prolongement du premier, ce qui allonge le parcours que doit réaliser le Bee-Bot. La consigne est de programmer le robot de sol en équipe pour qu’il rejoigne le plus rapidement possible l’endroit où est placé le bonbon. Des pauses en cours de route sont autorisées.

Figure 3 • Parcours du Bee-Bot avec rotation à gauche
Dans un troisième et dernier temps, un autre bonbon est placé au bout du deuxième tronçon de route qui est cette fois disposé à angle droit par rapport au premier (cf. la figure 3). Cette étape permet aux enfants d’acquérir la notion de rotation. La même consigne est répétée.
3.2.3. Séance 3 : Recherche d’un trésor sans étape (20 à 30 minutes)
Le tapis de sol « L’île au trésor », quadrillé en seize cases (cf. la figure 4) est disposé sur une table. Un trésor est figuré sur une des cases de cette carte figurative. L’expérimentatrice place le Bee-Bot sur une autre case située en diagonale par rapport à la case du trésor.
La consigne est de programmer le jouet en équipe pour qu’il se rende, sans interruption, à la case au trésor. Un seul changement de direction peut être effectué durant l’itinéraire. Avant de commencer à manipuler le robot, quelques minutes sont consacrées à nommer les différents endroits particuliers représentés sur la carte de l’île au trésor.

Figure 4 • Tapis de sol quadrillé « L’île au trésor »
3.2.4. Séance 4 : Recherche d’un trésor avec étape (20 à 30 minutes)
Le tapis de sol « L’île au trésor » (cf. la figure 4) est à nouveau disposé sur une table. Cette fois, il est accompagné d’une série de cartes à jouer. Ces cartes, en papier plastifié de douze centimètres sur quinze, reproduisent à l’identique chacune des seize cases de la carte de l’île. Quelques minutes sont consacrées à l’explicitation du rôle des cartes à jouer.
Trois des cartes sont tirées au sort : une première désigne la case de départ (A) ; une deuxième désigne un endroit de passage obligé (case B) et une troisième représente la destination à atteindre (case C). Un élève doit poser le Bee-Bot sur la case désignée par la première carte. Les membres de l’équipe reçoivent la consigne de se mettre d’accord sur la succession de boutons à pousser pour programmer le robot de manière à ce qu’il effectue un parcours qui passe obligatoirement par la case B avant de se diriger vers la case au trésor (C).
3.3. Méthodologie d’analyse du comportement des partenaires d’un apprentissage collectif
3.3.1. Analyse unifiée des actions posées et des messages échangés
Pour effectuer l’analyse de la collaboration entre les partenaires de l’activité de programmation du robot de sol, nous avons adopté une méthodologie (Strebelle et Depover, 2013) qui se centre à la fois sur l’analyse des dialogues entre les acteurs de la collaboration et sur les objets de l’environnement exploités par les apprenants dans le cadre des tâches qui leur sont proposées. Cette méthode réside dans une analyse unifiée (« unified analysis ») des actions effectuées par les partenaires de l’activité et des messages échangés par ces derniers au cours de leurs interactions (Avouris et al., 2003). Le formalisme mis en œuvre se fonde donc sur deux considérations de base : d’une part, une perspective « orientée objet » des rôles tenus par les partenaires impliqués dans une activité et, d’autre part, une analyse concomitante des dialogues et des actions sur les objets.
Le but de cette méthode d’analyse consiste à identifier des séquences fonctionnelles directement reliées aux objets utilisés par les partenaires d’une production co-élaborative élaborée dans le cadre d’une activité de résolution de problème. Dans le cadre du dispositif décrit ici, nous appelons « séquence fonctionnelle » une suite d’interventions (actions et/ou actes de paroles d’un ou plusieurs partenaires) qui ont trait à la conception, à la réalisation et à l’évaluation d’une série d’instructions sur le Bee-Bot. Une séquence fonctionnelle est dite symétrique lorsque dans la suite d’interventions, au moins deux d’entre elles sont complémentaires, autrement dit, lorsqu’au moins une intervention d’un des membres de l’équipe est directement liée à une intervention d’un de ses partenaires. L’identification des séquences fonctionnelles que nous présentons ici de manière succincte s’effectue en deux temps : un codage de niveau 1 suivi d’un codage de niveau 2.
3.3.2. Codage de niveau 1 : classification des actions et des actes de parole
Les opérations effectuées par les partenaires d’une équipe pour réaliser une activité sont définies comme des interventions qui sont soit des modifications significatives apportées au Bee-Bot comme sa manipulation ou la pression sur un bouton, que nous appellerons « actions » dans la suite de ce texte, soit des paroles émises par les partenaires de l’activité. Cette dimension est appréhendée selon deux systèmes de classification spécifiques condensés dans une grille de codage des interventions.
Le premier système de classification concerne les actions effectuées dans le cadre des activités. Elles y sont classées en dix catégories dites secondaires regroupées en trois classes principales ou catégories primitives (Ducarme, 2014) :
- les actions en lien direct avec la programmation du robot de sol sont associées au code AP ; par exemple le fait d’actionner les boutons de programmation du Bee-Bot est codé APab ;
- les autres actions en rapport avec l’activité reçoivent le code AA ; par exemple le fait de montrer avec le doigt le déplacement que le robot va devoir effectuer sur la carte au trésor est codé AAmd ;
- les actions hors propos sont notées AH ; par exemple, le fait de déplacer un autre objet que ceux qui participent à l’activité, comme une chaise, est codé AHau.
Le second système de classification concerne les messages échangés entre les élèves. Ces messages sont décryptés suivant les principes d’une analyse de contenu du type de l’analyse conversationnelle. A l’instar de plusieurs chercheurs (Paulus, 2005), (Nastri et al., 2006), (Weinberger et Fisher, 2006), (Quintin, 2008), (Strebelle et Depover, 2013), nous adoptons l’acte de parole comme unité d’analyse : « Un acte de parole est un acte de communication qui consiste en la mise en relation d’un projet d’action communicationnelle et d’une énonciation langagière qui sert de support à une visée intentionnelle d’action... Un acte de parole, au-delà de sa fonction de dire ou vouloir dire quelque chose, constitue un acte social au moyen duquel les acteurs sociaux interagissent » (Bromberg et Chabrol, 1993, p. 296). Les actes de parole constituent pour les acteurs sociaux des moyens interactifs de maîtriser ou de résoudre des problèmes concrets ou symboliques. Dans notre corpus de données, l’acte de parole correspond le plus souvent au message dans sa globalité, mais quand le message analysé comporte plusieurs intentions de communication, le codeur est amené à le segmenter en différents actes de paroles et donc en plusieurs unités de codage. Dans ce dispositif, l’interprétation de chaque message et la décision éventuelle de le segmenter en plusieurs actes de parole tiennent compte des messages émis antérieurement et ultérieurement par les acteurs (élèves ou enseignant) ainsi que des actions menées en parallèle par ces derniers.
Concrètement, il s’agit de caractériser chaque unité de codage, chaque acte de parole donc, en le classant dans un premier temps au sein d’une catégorie déterminée parmi sept catégories principales ou primitives et en la classant dans un deuxième temps au sein d’une catégorie secondaire. Au premier niveau, les actes de parole sont catégorisés en informatifs, actionnels, évaluatifs, communicationnels, interactionnels, socio-affectifs ou hors propos. Chacune de ces catégories principales est définie ci-après.
- Nous appelons acte de parole informatif tout message ou partie de message qui vise à décrire, caractériser, rendre compte, de manière non évaluative, des éléments de la situation et de leurs relations ou à solliciter des informations relatives à la situation. Les actes de parole informatifs sont associés au code PF. La classe des actes de parole informatifs comporte 10 catégories secondaires.
- Un acte de parole actionnel est un message, ou une partie de message, relatif à une action qui est à effectuer, qui est en cours d’accomplissement ou qui a été effectuée. Ce type d’acte de parole reçoit le code PA. Selon la terminologie de Chabrol et Bromberg (Bromberg et Chabrol, 1993, p. 305), il a trait « au faire, au faire faire, au devoir faire, au pouvoir faire ou au vouloir faire ». Concrètement, un acte de parole actionnel vise, dans le cadre de la situation, à proposer d’effectuer une action, à inciter à effectuer une action, à s’engager à effectuer une action, à refuser d’effectuer une action, à déclarer effectuer ou avoir effectué une action, à déclarer observer les résultats d’une action ou encore à demander des éléments d’information à propos d’une action ou à solliciter une information relative à une action. La classe des actes de parole actionnels comporte six catégories secondaires.
- Nous appelons acte de parole évaluatif et codons PE tout message ou partie de message qui vise à exprimer ou à solliciter un jugement ou une appréciation sur les éléments de la situation, sur les résultats des actions accomplies par les partenaires dans le cadre de la situation ou encore sur les modalités et l’efficacité de la collaboration au sein de l’équipe. L’évaluation peut être positive, un marqueur « p » est alors associé au code, ou négative, un marqueur « n » est alors associé au code. La classe des actes de parole évaluatifs comporte huit catégories secondaires.
- Nous appelons acte de parole interactionnel et codons PI, tout message ou partie de message qui vise à la co-élaboration des identités des partenaires et à la co-gestion de leurs relations, selon la situation ou les enjeux, pour les améliorer ou les remettre en cause. La classe des actes de parole interactionnels comporte quinze catégories secondaires.
- Nous appelons acte de parole communicationnel et codons PC, tout message ou partie de message qui a pour visée la gestion ou la régulation de la communication en fonction des buts et des enjeux d’action et en fonction d’un contrat de communication éventuellement implicite. La classe des actes de parole communicationnels comporte huit catégories secondaires.
- Nous appelons acte de parole socio-affectif et codons PSA tout message ou partie de message qui traduit ou sollicite un affect positif ou négatif en rapport avec la situation. Les actes de parole socio-affectifs sont classés en une des trois catégories secondaires.
- Nous classons dans la catégorie « actes de parole hors propos » et codons PH, les actes de parole n’ayant pas directement trait à la situation comme faire allusion à un événement survenu dans un autre cadre, parler d’un tiers sans que cela ait un rapport direct avec la situation ou encore demander pour aller aux toilettes. Nous ne distinguons pas de catégorie secondaire pour ce type d’acte de parole.
La vérification de la fidélité du classement des actes de parole a fait intervenir trois codeurs à l’occasion de sessions de codage successives entre lesquelles un accompagnement a été mis en place en vue de clarifier certains principes et certaines catégories de codage. Comme le montrent les tableaux 1 et 2, une amélioration substantielle a pu être obtenue à travers cet effort de clarification jusqu’à observer une valeur de concordance de 0.820 qui, selon les critères les plus souvent utilisés, peut être considérée comme très bonne.
Tableau 1 • Coefficients de Kappa à trois sessions de tests impliquant les codeurs A et B (catégories principales)
|
Session |
K de Kappa |
Taux de signification (p.) |
Accord |
|
Test 1 |
0.64 |
0,00 |
0.61 < K < 0,68 |
|
Test 2 |
0.67 |
0,00 |
0.61 < K < 0,68 |
|
Test 3 |
0.68 |
0,00 |
0.68 < K < 0,80 |
Tableau 2 • Coefficient de Kappa à deux sessions de tests impliquant les codeurs A et C (catégories principales)
|
Session |
K de Kappa |
Taux de signification (p.) |
Accord |
|
Test 1 |
0.63 |
0,00 |
0.61 < K < 0,68 |
|
Test 2 |
0.82 |
0,00 |
K > 0,80 |
En complément des tests de Kappa sur les catégories principales, nous avons éprouvé la concordance des classements pour les catégories secondaires pour les codeurs A et C. Les résultats obtenus sont comparables à ceux correspondant aux catégories principales pour la première session de test (cf. le tableau 3).
Tableau 3 • Coefficient de Kappa à une session de tests impliquant les codeurs A et C (catégories secondaires)
|
Session |
K de Kappa |
Taux de signification (p.) |
Accord |
|
Test 1 |
0.65 |
0,00 |
0.61 < K < 0,68 |
3.3.3. Codage de niveau 2 : écriture synthétique des
séquences fonctionnelles
Le second niveau de codage permet d’analyser de quelle manière se succèdent et s’imbriquent les différentes interventions effectuées par les partenaires d’une production co-élaborative commune. Il consiste à regrouper en séquences fonctionnelles les interventions relatives à une même tâche de programmation du robot de sol et à les écrire sous la forme synthétique d’une formule (cf. le tableau 4). Cette écriture synthétique des interventions au sein des équipes permet aux chercheurs de repérer des séquences symétriques ainsi que des patterns d’interactions relatifs à des modes de fonctionnement collaboratif des partenaires au sein des équipes.
Chaque sujet de l’échantillon est désigné par un code allant de S1 à S21 (cf. le tableau 7 pour la répartition des sujets par équipe). L’enseignant est désigné par le code ENS. Le code de l’action ou de l’acte de parole que le sujet réalise suit le code de l’émetteur. Pour en faciliter la distinction entre actes de parole et actions, les codes de ces dernières sont notés en caractères gras dans la formule. Par exemple, le code S10APab présent dans le premier extrait du tableau 4 traduit « le sujet 10 réalise une action en rapport avec la programmation du robot (AP) qui consiste à actionner (a) les boutons du Bee-Bot (b) ». Quand le récepteur d’un acte de parole est clairement identifié, son code est noté entre parenthèses après le code de l’émetteur. Par exemple, ENS(S14)PIso traduit « l’enseignant émet un acte de parole en lien avec les interactions (PI) en sollicitant le sujet 14 ».
Tableau 4 • Extraits de formules de codage des séquences fonctionnelles symétriques observées dans le cadre d’activités de programmation collaborative avec le Bee-Bot
|
Extrait de formules de séquences fonctionnelles symétriques |
Interprétation |
|
ENS(S10)PApm, S10APab |
L’enseignant pose un acte de parole actionnel qui consiste à proposer au sujet 10 de manipuler le Bee-Bot, le sujet 10 effectue une action en lien avec la programmation qui consiste à actionner les boutons du Bee-Bot. |
|
ENS(E2)PIso, S6(ENS)PIrd, ENS(E2)PIso, S7(ENS)PIrd |
L’enseignant pose un acte de parole interactionnel qui consiste à solliciter l’équipe 2, le sujet 6 pose un acte de parole interactionnel qui consiste à répondre à l’enseignant, l’enseignant sollicite à nouveau l’équipe 2 sur le plan interactionnel, le sujet 7 lui répond. |
|
ENS(E4)PIso, S15(ENS)PIrd, S15APab |
L’enseignant sollicite l’équipe 4 sur le plan interactionnel, le sujet 15 lui répond tout en actionnant les boutons du Bee-Bot. |
Les caractères soulignés signifient que les interventions (actions ou actes de paroles) sont réalisées simultanément. Par exemple, S13APab S14APab traduit « les sujets 13 et 14 actionnent les boutons du Bee-Bot en même temps » ou S15PIrd S15AAm, « le sujet 15 répond à la question posée en réalisant un autre type d’action (AA) qui n’a pas directement trait à la programmation et qui consiste à montrer (m) les boutons du Bee-Bot ».
4. Analyse des résultats
4.1. Analyse inter-équipes
Les six équipes de notre échantillon ont été en mesure d’effectuer avec succès et dans le temps imparti l’ensemble des activités prévues au sein de chacune des trois séances du scénario pédagogique qui prévoient la programmation d’un parcours du Bee-Bot. Les données du tableau 5 permettent de comparer les chiffres des réussites et des échecs des parcours programmés par les différentes équipes. Globalement, sur l’ensemble des séances qui comportent des consignes explicites de programmation (les séances 2 à 4), on observe un peu plus du double d’échecs (215) que de réussites (104). Par ailleurs, le taux de réussite progresse de séance en séance et tout particulièrement au sein de l’équipe E5. Nous pouvons en conclure que le dispositif mis en place permet de développer les compétences de programmation du robot de sol quelles que soit la dynamique collective propre à chaque équipe.
Tableau 5 • Parcours du Bee-Bot programmés par séance du scénario pédagogique
|
|
Séance 2 |
Séance 3 |
Séance 4 |
Séances 2 à 4 |
||||
|
Equipe |
Réussite |
Echec |
Réussite |
Echec |
Réussite |
Echec |
Réussite |
Echec |
|
E1 |
8 |
13 |
4 |
14 |
4 |
6 |
16 |
33 |
|
E2 |
5 |
15 |
12 |
11 |
5 |
9 |
22 |
35 |
|
E3 |
6 |
15 |
11 |
8 |
4 |
9 |
21 |
32 |
|
E4 |
8 |
13 |
3 |
20 |
5 |
12 |
16 |
45 |
|
E5 |
5 |
12 |
1 |
11 |
7 |
7 |
13 |
30 |
|
E6 |
7 |
15 |
4 |
14 |
5 |
11 |
16 |
40 |
|
Total |
39 |
83 |
35 |
78 |
30 |
54 |
104 |
215 |
Il convient quand même de remarquer que les résultats à la séance 3 sont fort contrastés avec un taux de réussite très faible au sein des équipes E1, E4, E5 et E6 alors que ce taux de réussite est particulièrement élevé au sein des équipes E2 et E3 (cf. les données surlignées dans le tableau 5).
Par ailleurs, les données du tableau 6 permettent de comparer le fonctionnement des équipes, notamment celles qui sont constituées de quatre élèves (soient les équipes E1, E2 et E3) avec celles qui n’en comptent que trois (soient les équipes E4 ; E5 et E6). En comparant globalement les chiffres des interventions centrées sur la tâche (cf. le tableau 6 dans lequel nous n’avons pas tenu compte des actes de parole hors propos), c’est-à-dire en cumulant les actions de programmation (AP) et les autres actions (AA) avec les actes de parole, on constate qu’ils varient peu : de 330 pour l’équipe E5 à 451 pour l’équipe E2. Les interventions sont en moyenne plus nombreuses dans les équipes de quatre que dans les équipes de trois, mais la moyenne des interventions par élève est de l’ordre de 15 % plus élevée au sein des équipes de trois qu’au sein des équipes de quatre.
De manière transversale, le nombre brut d’actes de parole centrés sur la tâche qui ont été comptabilisés au sein d’une équipe est toujours plus grand que le nombre d’actions sur le robot de sol. Si cette différence est fort marquée au sein de cinq des six équipes qui constituent l’échantillon, elle est moindre au sein de l’équipe E4 qui a un comportement atypique puisqu’on y dénombre le plus d’actions sur le Bee-Bot (184) et le moins d’actes de parole (188). La dynamique particulière de cette équipe E4 sera discutée à la section 4.3. Dans l’ensemble, à l’exception de l’équipe E4, les verbalisations ont donc pris une place déterminante dans la réalisation collaborative des activités.
Tableau 6 • Occurrences des interventions et des séquences fonctionnelles symétriques en fonction de la taille de l’équipe
|
Nombre d’élèves par équipe |
4 |
3 |
||||
|
Equipe |
E1 |
E2 |
E3 |
E4 |
E5 |
E6 |
|
Interventions (Actions + Actes de parole) |
391 |
451 |
353 |
372 |
330 |
332 |
|
Moyenne des interventions par équipe |
398 |
345 |
||||
|
Moyenne des interventions par élève |
99 |
115 |
||||
|
Actions (A) |
149 |
178 |
152 |
184 |
138 |
114 |
|
Moyenne des actions par équipe |
160 |
145 |
||||
|
Moyenne des actions par élève |
40 |
49 |
||||
|
Actes de parole (P) |
242 |
273 |
201 |
188 |
192 |
218 |
|
Moyenne des actes de parole par équipe |
239 |
199 |
||||
|
Moyenne des actes de parole par élève |
60 |
66 |
||||
|
Séquences fonctionnelles symétriques (SFS) |
17 |
22 |
12 |
24 |
15 |
16 |
|
Moyenne des SFS par équipe |
17 |
18 |
||||
Les moyennes par élève des actions (quarante pour les équipes constituées de quatre sujets contre quarante-neuf pour les équipes de trois) et des actes de parole (soixante pour les équipes constituées de quatre sujets contre soixante-six pour les équipes de trois) sont influencées par la taille de l’équipe puisqu’elles sont respectivement de près de 23 % et de 10 % plus élevées dans les équipes de trois individus que dans les équipes de quatre.
Le codage des données nous a permis de comptabiliser les séquences fonctionnelles symétriques (SFS) au sein des différentes équipes. Les résultats sont très variables puisque le nombre de ces SFS passe du simple au double avec un minimum de douze séquences SFS pour l’équipe E3 et un maximum de vingt-quatre pour l’équipe E4. Cependant, la moyenne des séquences SFS des équipes qui comportent trois membres (18 séquences) est similaire à celle des équipes de quatre sujets (17 séquences). Dans le cadre de notre étude, ces chiffres ne nous permettent pas de formuler une quelconque hypothèse quant à une éventuelle influence de la taille de l’équipe sur le nombre de séquences fonctionnelles symétriques observées par équipe.
Les séquences fonctionnelles symétriques ont été analysées de manière qualitative sur la base de la taxonomie de Verba (Verba, 1994). Les séquences observées se rapportent tantôt à de l’observation-élaboration lorsque le comportement d’un sujet provoque un comportement chez un autre sujet, tantôt à de la co-construction lorsque des partenaires au sein d’un groupe confrontent leurs idées pour élaborer un objectif commun et tantôt, à de l’activité guidée lorsqu’un sujet reçoit de l’aide d’un de ses pairs ou lui en propose.
A titre d’illustration, nous reproduisons ci-après la formule d’une séquence fonctionnelle symétrique qui résulte d’une analyse des traces des interactions, au cours d’une tâche de programmation entre trois des quatre partenaires de l’équipe E2 au cours de la séance 2, un des membres de cette équipe, le sujet S7, n’ayant pas participé à la séquence.
S5PApq, S5APab, S8PAsu, S8AAmb, S5AAmb, S6APab, S8APab, S8PAex, S5PEco+
Cette séquence fonctionnelle symétrique se traduit de la manière suivante : le sujet 5 émet un acte de parole actionnel, qui consiste à poser une question à propos de la tâche à effectuer avant d’actionner les boutons du Bee-Bot ; le sujet 8 émet un acte de parole actionnel, qui consiste à suggérer une action tout en désignant des boutons sur le robot que le sujet désigne également ; le sujet 6 et le sujet 8 prennent le relai en actionnant successivement les boutons du Bee-Bot ; le sujet 8 explicite ses actions ; le sujet 5 émet un acte de parole, en évaluant de façon positive le résultat du déplacement du robot consécutif à l’activation de la séquence qui a été programmée en commun.
4.2. Analyse inter-sujets : profils de comportements sociaux
L’analyse des interactions entre sujets au sein des équipes nous a conduits à définir cinq profils contrastés de comportements sociaux chez les élèves. La détermination de ces comportements se fonde sur une combinaison de quatre ensembles de données qui ont été collectées au terme des activités : le volume d’actions (A), le volume d’actes de parole (P), les types d’actes de parole (P) et la participation aux séquences fonctionnelles symétriques (SFS). Ce dernier critère traduit la mesure dans laquelle l’élève réagit aux interventions de ses partenaires, mais également la mesure dans laquelle ses partenaires réagissent à ses propres interventions. Les caractéristiques de ces cinq profils sont présentées dans le tableau 7.
La répartition de ces profils au sein de nos différentes équipes, résumée dans le tableau 8, est la suivante.
4.2.1. Les leaders
Quatre sujets de quatre équipes différentes (E2, E4, E5 et E6) se sont investis de manière quantitativement plus importante que leurs partenaires, et ce, de manière récurrente au cours des différentes activités. Ils ont exercé une forme de leadership bienveillant au sein de leur équipe tout en montrant une tendance à vouloir monopoliser le jouet. Ce sont généralement des élèves qui obtiennent des résultats scolaires au-dessus de la moyenne de leur classe. Au terme de la séquence d’activités, trois de ces quatre élèves qualifiés de leaders ont déclaré qu’ils auraient apprécié programmer seuls le robot plutôt qu’en équipe.
Tableau 7 • Profils comportementaux des élèves au cours d’activités de programmation collaborative du Bee-Bot en petits groupes
|
|
Actions (A) |
Actes de parole (P) |
Séquences fonctionnelles symétriques (SFS) |
|
|
Volume (A) |
Volume (P) |
Types (P) |
Participation (SFS) |
|
|
Leader |
important |
important |
variés, principalement actionnels, évaluatifs (positifs comme négatifs) et informatifs |
importante |
|
Compétiteur |
important |
assez important |
principalement évaluatifs négatifs et interactionnels |
assez importante |
|
Conciliant |
assez important |
assez important |
principalement actionnels et évaluatifs positifs |
peu importante |
|
Suiveur |
peu important |
peu important |
(pas de type dominant) |
faible |
|
Désinvesti |
faible |
faible |
parfois hors propos |
faible à nulle |
4.2.2. Les compétiteurs
Six sujets de trois équipes différentes (E1, E3 et E5) ont fait preuve de comportements de compétition. Lorsqu’ils manipulaient le jouet, ils avaient tendance à ne pas prendre en considération les actions réalisées au préalable par leurs partenaires. La plupart du temps, ils refusaient qu’un autre membre de l’équipe intervienne pour les aider ou ils ne tenaient pas compte de leurs propositions. Quand un de ces élèves réalisait une séquence de programmation qui s’avérait efficiente, il ne faisait pas spontanément part de ses démarches à ses partenaires. Trois de ces six élèves se sont à plusieurs reprises moqués des essais infructueux de leurs partenaires. Pourtant, au terme de la séquence d’activités, un seul de ces six élèves qualifiés de compétiteurs a déclaré qu’il aurait préféré travailler seul avec le Bee-Bot plutôt qu’en équipe.
4.2.3. Les conciliants
Trois sujets de deux équipes différentes (E1 et E2) ont participé aux activités de façon active, mais légèrement en retrait par rapport aux autres membres de leur équipe respective. Ils ont rapidement compris le principe de la programmation, mais ils laissaient leurs partenaires faire des essais. Ils n’hésitaient pas à les aider, mais sans imposer leurs points de vue. Ces trois sujets ont de très bons résultats scolaires.
4.2.4. Les suiveurs
Six sujets de quatre équipes différentes (E1, E4, E5 et E6) ont éprouvé des difficultés à programmer le robot correctement. Ils se laissaient aider sans objection. Ils participaient peu aux discussions. Au terme de la séquence d’activités, cinq d’entre eux ont déclaré avoir apprécié travailler en équipe.
4.2.5. Les désinvestis
Deux sujets de deux équipes (E1 et E2) différentes ont relativement peu participé aux activités. A chaque séance, leur implication décroissait rapidement au cours du temps jusqu’à ce qu’ils finissent par se désinvestir complètement de l’activité. D’après leurs enseignantes respectives, ce comportement n’est pas propre aux activités avec le Bee-Bot puisqu’elles déclarent l’avoir également observé à plusieurs reprises au cours des activités de classe.
4.3. Dynamiques collaboratives au sein des équipes
D’une séance d’activités à l’autre, et donc au fur et à mesure que la difficulté grandissait, les élèves ont eu tendance à davantage collaborer à la recherche de solutions communes. Ainsi l’implication au sein des séquences fonctionnelles symétriques a évolué de manière positive chez dix-sept sujets de l’échantillon alors qu’elle n’a régressé que chez un seul (S7 qui a un profil de désinvesti) et est restée stable chez les trois derniers (S3, S9 et S18).
La combinaison des types de profils observés semble avoir eu une influence sur la collaboration au sein des équipes. Ainsi, par exemple, l’équipe E3 composée de quatre sujets exclusivement compétiteurs a fonctionné quasi continuellement sur le mode de la confrontation parfois conflictuelle avec une tension nerveuse palpable à chaque séance. C’est notamment en son sein qu’ont été observés le moins de séquences fonctionnelles symétriques (tableau 6) d’une part, et la quasi-totalité des évaluations négatives et des actes de parole interactionnels, notamment des moqueries, d’autre part. Cette dynamique peu encline à la collaboration n’a pas empêché l’équipe d’être efficace en termes de progression de ses résultats comme le montre le tableau 5.
Un autre exemple de combinaison particulière est celui de l’équipe E4 constituée d’un leader et de deux élèves que nous avons qualifiés de suiveurs. Un climat de travail serein et fructueux s’est instauré naturellement dans cette équipe. C’est notamment en son sein que nous avons enregistré une des moindres proportions d’actes de parole hors propos. Pour rappel, ce sont les membres de cette équipe qui ont émis le moins d’actes de parole et qui ont effectué le plus d’actions. Ces élèves programmaient le robot à tour de rôle et n’hésitaient pas à demander l’avis de leurs partenaires, quand ils doutaient des instructions qu’ils étaient sur le point d’encoder, ou à demander de l’aide quand un programme s’avérait incorrect au cours d’un essai. Quand l’un d’entre eux avait la main, les autres ne tentaient pas de la lui prendre, mais commentaient ses actions et lui faisaient des suggestions constructives. Comme nous l’avons déjà noté, c’est l’équipe qui a produit le plus grand nombre de séquences fonctionnelles symétriques (cf. le tableau 6). L’occurrence de ces dernières s’est intensifiée de séance en séance.
Tableau 8 • Répartition des profils par équipe
|
Equipe |
Compétiteur |
Conciliant |
Leader |
Suiveur |
Désinvesti |
|
E1 |
S2 |
S1 |
|
S4 |
S3 |
|
E2 |
|
S5, S8 |
S6 |
|
S7 |
|
E3 |
S9, S10, S11, S12 |
|
|
|
|
|
E4 |
|
|
S15 |
S13, S14 |
|
|
E5 |
S17 |
|
S16 |
S18 |
|
|
E6 |
|
|
S21 |
S19, S20 |
|
Un élément à remarquer au sujet des combinaisons de profils qui sont apparues au sein de notre échantillon consiste dans le fait qu’un comportement de leader s’est systématiquement manifesté dans chacune des équipes constituées de trois élèves alors que ce rôle n’est apparu que dans une seule équipe de quatre membres, l’équipe E2. Des trois équipes comptant quatre élèves, c’est cette équipe E2 qui a produit le plus de séquences fonctionnelles symétriques (cf. le tableau 6) et qui a le plus progressé en termes d’interactions collaboratives au cours de la séquence d’activités. Par ailleurs, l’équipe E3 constituée uniquement de compétiteurs est celle qui a produit le moins de séquences fonctionnelles symétriques (cf. le tableau 6).
5. Conclusions et perspectives
Les sujets d’un échantillon de vingt et un enfants âgés de cinq à six ans ont, au sein d’équipes de trois ou quatre individus, effectué des activités d’exploration et de programmation avec le robot de sol Bee-Bot dans le cadre de la résolution de situations problèmes. Les résultats de notre étude rejoignent ceux de recherches antérieures (Komis et Misirli, 2012), (Komis et Misirli, 2013), en ce sens que l’application d’un scénario pédagogique en classes de fin de maternelle et début du primaire montre qu’une approche des concepts préliminaires de la programmation à l’aide de ce jouet programmable est possible avec de jeunes enfants. En effet, avec l’aide didactique de l’expérimentatrice, les six équipes de notre échantillon ont réussi à mener à leur terme les activités du scénario dans le timing prévu. Malgré la difficulté croissante des tâches proposées dans le scénario pédagogique, seuls deux élèves se sont peu à peu désintéressés des activités alors que tous les autres sont restés actifs, interactifs et productifs tout au long de l’expérience.
Au terme d’une séquence de quatre séances d’activités, tous les enfants ont déclaré avoir aimé travailler avec le Bee-Bot. Aucun d’entre eux n’a exprimé un sentiment de découragement, même ceux qui ont rencontré des difficultés lors de la programmation du robot et qui se sont progressivement désinvestis. Tous déclarent avoir apprécié chercher des solutions avec leurs partenaires même si une proportion importante d’entre eux déclare qu’ils auraient préféré programmer le jouet seuls plutôt qu’en équipe.
Peu de comportements de collaboration spontanés ont pu être observés. Toutefois, après que l’expérimentatrice ait systématiquement amené les sujets de l’échantillon à comparer leurs propres stratégies et procédures avec celles de leurs partenaires au sein des équipes, des comportements collaboratifs explicites et plus rarement implicites (Strebelle et Depover, 2013) sont apparus comme de l’observation-élaboration, de la co-construction et de l’activité guidée (Verba, 1994). A ce propos, l’effet de l’intervention de l’adulte enseignant ou expérimentateur au sein des groupes mériterait d’être discuté dans le cadre d’un prolongement de cette étude.
De manière générale, les échanges verbaux ont été nombreux à l’occasion de discussions animées. Les élèves ont passé un temps relativement long à donner leur avis avant de programmer le jouet ainsi qu’à expliciter leurs démarches après l’avoir fait.
Comme nous l’avons souligné, les enfants de l’échantillon n’ont pas collaboré facilement. Un sentiment de compétition relativement marqué a été observé au sein de la plupart des équipes et tout particulièrement chez les équipes comportant un compétiteur en leur sein ; ce sentiment peut être rapproché de ce que Piaget décrit comme relevant de la pensée égocentrique (Baudrit, 2007). C’est avec une certaine difficulté que la plupart des élèves de notre échantillon sont parvenus à dépasser cet égocentrisme. Beaucoup ont eu tendance à vouloir monopoliser le robot de sol tout au moins dans un premier temps. Ainsi, dans le cadre des premières activités plus faciles à réaliser, la majorité des enfants refusaient l’aide proposée par les autres membres de leur équipe. Les élèves acceptaient plus facilement de l’aide de leurs partenaires ou la demandaient davantage au fur et à mesure que la difficulté de la tâche augmentait, principalement au cours des deux dernières séances. Systématiquement, les élèves qui commençaient à manipuler le robot essayaient d’abord de le programmer seuls. Ce n’est qu’après plusieurs échecs qu’ils acceptaient l’aide de leurs partenaires et, pour certains, la sollicitaient. La demande d’aide, et par corollaire de comportements collaboratifs, a donc émergé de manière davantage spontanée lorsque des difficultés plus importantes survenaient.
La méthode d’analyse des comportements sociaux que nous avons mise en œuvre nous a permis de déterminer cinq types de profils : les comportements de compétiteurs, de leaders, de conciliants, de suiveurs et de désinvestis. Certains de ces profils peuvent être comparés à ceux qui ont été proposés par Pléty (Pléty, 1998) par exemple les leaders ont des caractéristiques communes avec les animateurs, ou les conciliants avec les indépendants. D’autres sont plus spécifiques aux comportements de la classe d’âge des apprenants que nous avons observés. Dans la foulée, nous avons été en mesure de mettre en évidence des dynamiques collectives en fonction de la combinaison des profils. Ainsi, dans le cadre de notre recherche, la taille de l’équipe semble avoir influencé la collaboration en quantité, mais pas en qualité. Globalement, les sujets se sont davantage investis personnellement dans les groupes de trois individus que dans les groupes de quatre. Le fait qu’un rôle de leader ait systématiquement été assumé au sein des équipes de trois, mais pas dans celles de quatre a pu avoir eu une influence positive sur la dynamique interactive au sein de ces équipes. Ces interprétations nous conduisent à émettre l’hypothèse que le climat instauré entre les jeunes partenaires, notamment par la confrontation de profils, influence la dynamique de programmation collaborative au sein de l’équipe. La vérification de cette hypothèse offre des perspectives de recherches ultérieures tout particulièrement au sein de triades. Il serait notamment intéressant d’analyser dans quelle mesure des coalitions de deux individus (Caplow, 1984), (Cartron et Winnykamen, 2004) pourraient avoir tendance à se former en leur sein.
 À
propos des auteurs
À
propos des auteurs
Albert STREBELLE est maître de conférence à l'Université de Mons (UMONS). Le contenu des enseignements qu’il assure a trait à la technologie de l’éducation. Ses travaux de recherche portent sur les usages pédagogiques des TIC et des réseaux sociaux, sur les dispositifs de formation à distance avec une centration particulière sur le tutorat et l'exploitation des traces, sur l'apprentissage collaboratif, sur le développement de compétences de modélisation scientifiques à l’école ainsi que sur l’élaboration de supports pédagogiques notamment dans le cadre de l’apprentissage mobile.
Adresse : Université de Mons, Faculté de Psychologie et des Sciences de l’Education, DESTE, 18, place du Parc, B-7000 Mons - Belgique
Courriel : albert.strebelle@umons.ac.be
Toile : http://ute.umh.ac.be/deste
Amandine DUCARME a une formation initiale d’institutrice maternelle. Elle est titulaire d’un master en sciences de l’éducation. Ses travaux de recherche concernent les technologies éducatives et portent spécifiquement sur l’analyse des dynamiques collaboratives dans le cadre de l’apprentissage collectif de la programmation dans l’enseignement fondamental.
Adresse : Université de Mons, Faculté de Psychologie et des Sciences de l’Education, DESTE, 18, place du Parc, B-7000 Mons - Belgique
Courriel : amandine.ducarme@alumni.umons.ac.be
Toile : http://ute.umh.ac.be/deste
Lionel MELOT est détenteur d’un master en sciences de l’éducation (Université de Mons, 2013) et professeur de sciences pendant 10 ans dans l’enseignement secondaire en Belgique francophone (niveau collège). En septembre 2014, il a intégré l’Unité de la Technologie de l’Éducation de l’Université de Mons en tant qu’assistant du Professeur Christian Depover. Ses travaux de prédilection portent sur l’analyse de l’intégration des nouvelles technologies dans l’enseignement élémentaire et secondaire. Son travail de thèse porte sur les facteurs prédictifs de persévérance et d'autorégulation des étudiants en formation à distance. Il est également auteur aux éditions Plantyn d’ouvrages scolaires de sciences à destination des apprenants du collège.
Adresse : Université de Mons, Faculté de Psychologie et des Sciences de l’Education, DESTE, 18, place du Parc, B-7000 Mons - Belgique
Courriel : lionel.melot@umons.ac.be
Toile : http://ute.umh.ac.be/deste
Christian DEPOVER est professeur à l’Université de Mons (UMONS). Il enseigne également à l’Université libre de Bruxelles (ULB). Il anime un centre de recherche et de développement consacré aux usages des technologies en éducation et au E-learning (Unité de Technologie de l’Éducation). Il partage son temps entre l’enseignement, la recherche et la consultation auprès d’organisations internationales.
Adresse : Université de Mons, Faculté de Psychologie et des Sciences de l’Education, DESTE, 18, place du Parc, B-7000 Mons - Belgique
Courriel : christian.depover@umons.ac.be
Toile : http://ute.umh.ac.be/deste
BIBLIOGRAPHIE
Avouris, N., Dimitracopoulou, A. et Komis, V. (2003). An Analysis of Collaborative Problem Solving: An Object Oriented Approach. Computers in Human Behavior, 19(2), 147-167.
Baudrit, A. (2007). L’apprentissage collaboratif. Bruxelles, Belgique : De Boeck.
Beraza, I., Pina, A. et Demo, B. (2010). Soft & Hard Ideas to Improve Interaction with Robots for Kids & Teachers. Dans Proceedings of the International. Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR 2010) (p. 549-557).
Blanchet, A. (1991). Pour un développement des objectifs métacognitifs de LOGO. Dans J., Gurtner et J. Retschitzki (dir.), LOGO et apprentissages (p. 61-78). Paris, France : Delachaux et Niestlé.
Bromberg, M. et Chabrol, C. (1993). Essai d’une nouvelle taxonomie des actes de parole pour l’analyse des interactions sociales. Paris, France : Ronéo.
Caplow, T. (1984). Deux contre un. Les coalitions dans les triades. Paris, France : ESF.
Cartron, A. et Winnykamen, F. (2004). Les relations sociales chez l’enfant. Genèse, développement, fonctions. Paris, France : Armand Colin.
De Michele, S., Demo, B. et Siega, S. (2008). A Piedmont SchoolNet for a K-12 Mini-Robots Programming Project: Experiences in Primary Schools. Dans Workshop Proceedings of the 1st International. Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR 2008) (p. 90-99).
Denis, B. et Baron, G-L. (1993). Regards sur la robotique pédagogique. Dans Proceedings of the 4th International Conference on Educational Robotics. Paris, France : INRP.
Depover, C., Karsenti, T. et Komis, V. (2007). Enseigner avec les technologies : favoriser les apprentissages, développer des compétences. Québec, Canada : Presses de l’Université du Québec.
Doise, W. et Mugny, G. (1981). Le développement social de l’intelligence. Paris, France : InterEditions.
Doise, W. et Mugny, G. (1997). Psychologie sociale et développement cognitif. Paris, France : Armand Colin.
Ducarme, A. (2014). Analyse de la collaboration chez de jeunes enfants lors de l’utilisation d’un jouet programmable de type LOGO : le Bee-Bot (mémoire 2e cycle, Université de Mons, Belgique).
Gauvain, M. et Rogoff, B. (1989). Collaborative Problem-Solving and Children’s Planning Skills. Developmental Psychology, 25, 135-171.
George, S. (2004). Analyse automatique de conversations textuelles synchrones d’apprenants pour la détermination de comportements sociaux. STICEF, 10, 165-193.
Greff, E. (1998). Le « jeu de l’enfant-robot » : une démarche et une réflexion en vue du développement de la pensée algorithmique chez les très jeunes enfants. Sciences et Techniques éducatives, 5(1), 47-61.
Greff, E. (2001). Résolution de problèmes autour du robot de plancher. Dans Actes du 28e Colloque Inter-IREM des formateurs et professeurs de mathématiques chargés de la formation des maîtres (p. 49-59). Orléans, France : IREM d'Orléans-Tours.
Gurtner, J., Retschitzki, J. et Leon, C. (1991). Du jaillissement à l’épanouissement de l’esprit. Dans J. Gurtner et J. Retschitzki (dir.), LOGO et apprentissages (p. 253-266). Paris, France : Delachaux et Niestlé.
Jermann, P. (2004). Computer Support for Interacting Regulation in Collaborative Problem-Solving (Thèse, Université de Genève, Suisse).
Komis, V. et Misirli, A. (2012). L’usage des jouets programmables à l’école maternelle : Concevoir et utiliser des scénarios pédagogiques de robotique éducative. Dans Actes du Colloque SIEST Méditerranée - Dispositifs, démarches, apprentissage dans l’Enseignement des sciences et technologies, Revue Skholê, 17, 143-154. IUFM Aix-Marseille, France.
Komis, V. et Misirli, A. (2013). Etude des processus de construction d’algorithmes et de programmes par les petits enfants à l’aide de jouets programmables. Dans B. Drot-Delange, G.-L. Baron et E. Bruillard (dir.), Sciences et technologies de l’information et de la communication (STIC) en milieu éducatif, Actes du colloque DidaPro5 – DidaSTIC, Clermont-Ferrand, France. Disponible sur internet.
Leroux, P., Nonnon, P. et Ginestié, J. (dir.). (2005). Actes du 8ème Colloque francophone de robotique pédagogique. Skholê HS(2). IUFM Aix-Marseille.
Nastri, J., Pena, J. et Hancock, J.T. (2006). The Construction of Away Messages: A Speech Act Analysis. Journal of Computer-Mediated Communication, 11(4), 1025-1045.
Palincsar, A.S. et Brown, A.L. (1984). Reciprocal Teaching of Comprehension-Fostering and Comprehension-Monitoring Activities. Cognition and Instruction, 1(2), 117-175.
Papert, S. (1981). Jaillissement de l’esprit. Ordinateur et apprentissage. Paris, France : Flammarion.
Paulus, T.M. (2005). Collaborative and Cooperative Approaches to Online Group Work: the Impact of Task Type, Distance Education, 26(1), 111-125.
Pekárová, J. (2008). Using a Programmable Toy at Preschool Age: Why and How? Dans Workshop Proceedings of the 1st International. Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR 2008) (p. 112-121).
Perret-Clermont, A.-N. (2000). La construction de l'intelligence dans l'interaction sociale. Berne, Suisse : Peter Lang.
Plétry, R. (1998). Comment apprendre et se former en groupe. Paris, France : Retz.
Quintin, J-J. (2008). Accompagnement tutoral d’une formation collective via Internet : Analyse des effets de cinq modalités d’intervention tutorale sur l’apprentissage en groupes restreints (Thèse, Université de Mons, Belgique).
Strebelle, A. et Depover, C. (2013). Analyse d’activités collaboratives à distance dans le cadre d’un dispositif d’apprentissage de la modélisation scientifique. Distances et Médiations des Savoirs, 3, 2-24.
Temperman, G. (2013). Visualisation du processus collaboratif et assignation de rôles de régulation dans un environnement d’apprentissage à distance (Thèse, Université de Mons, Belgique).
Vygotsky, L.S. (1978). Mind in Society: The Development of Higher Psychological Processes (M. Cole, V. John-Steiner, S. Scribner et E. Souberman, dir.). Cambridge, MA : Harvard University Press.
Vygotsky, L.S. (2013). Pensée et langage. Dans F. Sève (trad. et dir.), Y. Clot et L. Sève, (dir.), Pensée et langage. Suivi de « Commentaire sur les remarques critiques de Vygotski » par Jean Piaget. Paris, France : La Dispute. (Ouvrage original paru en 1934, Moscou).
Weinberger, A. et Fisher, F.A (2006). A Framework to Analyze Argumentative Knowledge Construction in Computer-Supported Collaborative Learning. Computers and Education, 46, 71-95.
Albert STREBELLE, Lionel MÉLOT, Amandine DUCARME, Christian DEPOVER, Analyse des comportements sociaux dans le cadre d’un apprentissage collectif de la programmation d’un robot de sol, Revue STICEF, Volume 24, numéro 1, 2017, DOI:10.23709/sticef.24.1.8, ISSN : 1764-7223, mis en ligne le 02/06/2017, http://sticef.org
© Revue Sciences et Technologies de l´Information et de la Communication pour l´Éducation et la Formation